Soyouz | TélévisionLe vaisseau Soyouz est équipé d'un circuit de télévision intérieur et extérieur qui, contrairement à ce qu'on pourrait penser, remplit des fonctions très importantes pour le bon déroulement d'une mission. Il permet notamment :
- de transmettre des images de l'équipage au TsUP, 1. Les origines : le système KretchetAu cours des premiers vols spatiaux, réalisés dans le cadre du programme Vostok, le besoin de transmettre au sol des images vidéos s'est très rapidement fait sentir. La toute première transmission vidéo depuis un vaisseau spatial a été réalisée depuis Korabl-Spoutnik 2, le 19 août 1960. 
Fig. 1 : Retransmission vidéo de NIKOLAÏEV en orbite à bord de Vostok-3, 11 août 1962. Quelques années plus tard, le bureau d'étude OKB-1 de Sergueï KOROLIOV se lance dans la conception d'un vaisseau spatial de nouvelle génération appelé 11F615, ou plus communément « Soyouz ». Il disposera d'un système de communications dont le développement est confié en 1964 à l'institut NII-885. Il regroupera les moyens de communications, de télémétrie et de télévision. Mais en 1965, un changement intervient. Le système de télévision est maintenant séparé du système de télécommunications, et le NII-885 n'est plus responsable de son développement. Cette responsabilité incombe désormais à l'Institut soviétique de Recherche Scientifique sur la Télévision, le VNIIT, dirigé par Igor ROSSELEVITCH. C'est déjà cet organisme qui avait fourni les systèmes précédents pour Vostok, ainsi que les caméras des sondes d'exploration lunaire. 
Fig. 2 : Igor Aleksandrovitch
ROSSELEVITCH,
directeur du VNIIT de 1954 à 1983. Le nouveau système de télévision (TVS, Телевизионная Система) est baptisé Kretchet. En Russe, un kretchet est un gerfaut, une race de faucon très présente dans le grand Nord. Ce système doit remplir trois fonctions principales : transmettre des images des cosmonautes, permettre le contrôle de l'amarrage à un autre vaisseau et permettre le contrôle de la trajectoire lors du retour sur Terre. Au total, le vaisseau est équipé de quatre caméras noir et blanc :
- une dans le compartiment de descente (SA) pour filmer les cosmonautes,  Fig. 3 : Une vue de la caméra placée
dans le SA de Soyouz-31 juste avant son lancement. Celle du SA est une caméra 625 lignes/25Hz. C'est à dire qu'elle prend 25 images par secondes, et que chaque image est constituée de 625 lignes. Kretchet est capable d'envoyer lui-même vers le sol les images filmées par ses caméras, sans passer par le système de télécommunications du vaisseau. Des récepteurs spécifiques sont donc mis en place dans toutes les stations sol de l'Union soviétique. 2. Arktour, l'arrivée de la couleurAu début des années 1970, l'Union soviétique et les Etats-Unis se lancent dans un grand programme commun appelé EPAS, qui vise à faire se rencontrer en orbite un vaisseau Apollo et un vaisseau Soyouz. Cette mission mettra la technologie soviétique sur le devant de la scène, et il faudra disposer d'images de qualité pour diffuser sur les télévisions occidentales ! Dès le mois de février 1973, le Ministère de l'industrie radio démarre un nouveau projet visant à améliorer le système Kretchet, notamment en remplaçant le noir et blanc par de la couleur. Ce système est baptisé Arktour, le Russe pour Arcturus, l'une des étoiles les plus lumineuses visibles depuis la Terre. Au VNIIT, toujours responsable du projet, Vladimir IVANOV est nommé à la tête du développement, et Anatoli NEKRASSOV sera son adjoint. 
Fig. 4 : Vladimir Borissovitch
IVANOV,
constructeur principal du système Arktour. L'avant-projet est remis dès juin 1973, et au cours du premier semestre 1974 le premier prototype de la nouvelle caméra AR-71TsT est prêt. Le système est testé dans l'Espace à bord de Soyouz-16, qui réalise en décembre 1974 une répétition générale de la rencontre Apollo-Soyouz. Ensuite, des essais de compatibilité électromagnétique avec les systèmes d'Apollo sont effectués aux Etats-Unis. Comme le vaisseau de la NASA a une atmosphère très inflammable (constituée à 100% de dioxygène après le lancement), les caméras soviétique doivent respecter des normes anti-incendie très strictes. 
Fig. 5 : Vladimir IVANOV avec la
caméra AR-71TsT. Le « vrai » vol Apollo-Soyouz a lieu en juillet 1975, et quelques instants avant le décollage, le système Arktour tombe en panne, Le TsUP décide de quand même procéder au lancement, et il appartient donc aux cosmonautes Alekseï LEONOV et Valeri KOUBASSOV de réparer en orbite. Vladimir IVANOV et une équipe d'ingénieurs se rendent au TsUP, près de Moscou, pour élaborer une solution avec le même matériel que celui présent à bord du vaisseau. La difficulté consiste à ouvrir le capot de la caméra, qui est fixé avec du polyépoxyde, mais les cosmonautes finissent par y parvenir, et la retransmission en direct à la télévision commence à l'heure ! 3. Le système KliostEn 1976, dans la lignée du système Arktour, le VNIIT lance le développement de son successeur : le système Kliost. En Russe, kliost signifie « loxia », c'est une espèce d'oiseau qu'on retrouve notamment dans la taïga. 
Fig. 6 : Un loxia. Kliost équipera la nouvelle version du vaisseau Soyouz, le 11F732, mieux connu sous le nom de « Soyouz T ». Comme ses prédécesseurs, ce système doit permettre de contrôler visuellement un amarrage, de contrôler la descente manuelle et de fournir des images des cosmonautes. Une grande nouveauté : Kliost équipera aussi les vaisseaux de ravitaillement Progress, dérivés des Soyouz. Cette fois, il n'y a certes aucun cosmonaute à filmer, mais des images TV sont nécessaires pour mener à bien les amarrages des Progress aux stations Saliout. 
Fig. 7 : Les différents équipements du système Kliost. 4. Description technique de Kliost-M4.1. GénéralitésEn 1986, une version améliorée du Soyouz fait son apparition : le Soyouz TM (11F732A51). Il est doté d'un système de télévision amélioré appelé Kliost-M. Il est conçu autour de deux boîtiers de commutation appelés KL-105. L'un de ces boîtiers, le KL-105-1, est situé dans le compartiment de vie (BO), juste derrière le panneau du placard estampillé « KhSA ». L'autre, le KL-105-2, est dans le Compartiment de Descente (SA), près du siège de gauche. 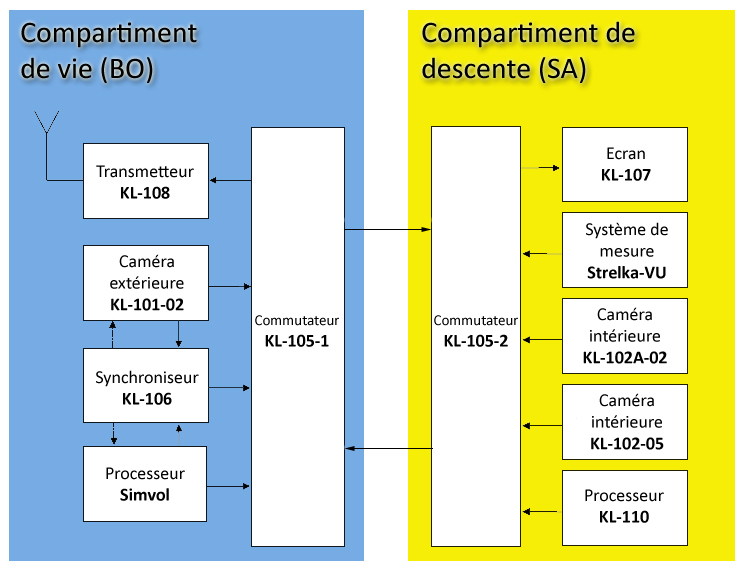
Fig. 8 : Diagramme de fonctionnement du système Kliost-M. Le rôle des commutateurs est de recevoir des informations, soit sous forme d'images vidéos, soit sous forme de données, et de les renvoyer vers l'écran KL-107 du panneau de contrôle du SA et vers le transmetteur radio KL-108, situé dans le BO. 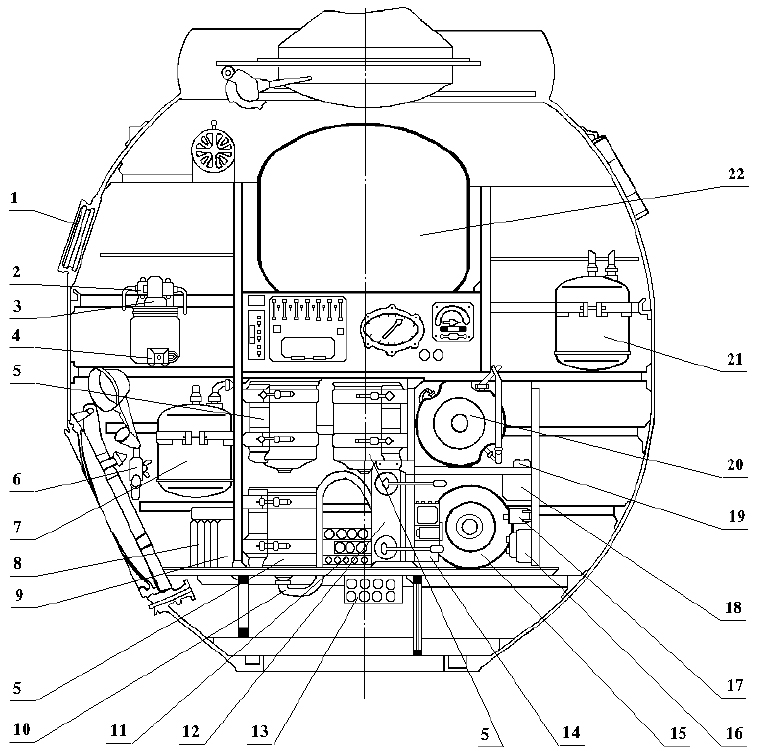
Fig. 9 : Schéma du placard du BO, panneaux démontés. 
Fig. 10 : L'écran KL-107 et le boîtier KL-105-2 dans le Compartiment de Descente. Comme les deux commutateurs communiquent entre eux, n'importe quelle donnée ou image vidéo peut être affichée et transmise. Le transmetteur KL-108 envoie les images vers la Terre au moyen de deux antennes ABD-24 situées sur la paroi extérieure du BO. Il peut fonctionner pendant 30h d'affilée et nécessite un préchauffage de 120". 
Fig. 11 : L'une des deux antennes ABD-24 du vaisseau Soyouz TMA-19. D'autre part, le vaisseau Soyouz est équipé de trois caméras vidéos, qui constituent l'élément central du système Kliost-M. Elles fournissent des images au format 4/3 et en 25Hz, avec 625 lignes par image. Chaque caméra peut fonctionner pendant 1h30 maximum, et nécessite un temps de préchauffage de 30s. Deux de ces caméras sont placées à l'intérieur du Compartiment de Descente (SA). La troisième est fixée à l'extérieur du Compartiment de Vie (BO). 4.2. Les caméras internesLes deux caméras internes servent à transmettre au TsUP des images des cosmonautes lors de la mise en orbite. A l'origine, sur les premiers Soyouz TM, il s'agissait de caméras noir et blanc KL-102. Elles ont un champ de vision de 60°x50°. L'une, appelée KL-102A-02, est tournée vers le côté bâbord du vaisseau et permet de voir le commandant de bord et l'ingénieur n°1 (siège de gauche). La seconde caméra interne, baptisée KL-102-05, est tournée vers l'ingénieur n°2 (siège de droite). 

Fig. 12 : Vues des caméras KL-102A-02 (à gauche) et KL-102-05 A partir de Soyouz TM-25, les KL-102 ont été remplacées par des KL-152 en couleur. Quand les caméras internes sont mises en marche, des lumières appelées KR-77 sont automatiquement allumées. Afin de réaliser des économies, les caméras internes de Kliost-M sont réutilisées d'un vol sur l'autre. Les cosmonautes les démontent peu après l'arrivée sur orbite et ils les ramènent sur Terre avec eux. 

Fig. 13 : Vues du SA de Soyouz TM-33 lors de son transfert du 20 avril 2002. Sur les vaisseaux de nouvelle génération Soyouz TMA-M, les projecteurs KR-77 ont été remplacés par les SG2-14V. Cette modification est effective au moins à partir de Soyouz TMA-02M. 4.3. La caméra externeLa caméra extérieure permet de visualiser la cible lors des manœuvres de rendez-vous et d'amarrage. Auparavant, il s'agissait d'une KL-101-02, mais elle a été remplacée par le nouveau modèle KL-153. Elle a les mêmes caractéristiques techniques que les caméras internes, à ceci près qu'elle est en noir et blanc. Son rôle est de fournir au pilote du vaisseau une image vidéo de la station orbitale à laquelle il doit s'amarrer. L'image est d'abord envoyée vers le commutateur KL-105-1 du BO. Ensuite, elle est renvoyée, d'une part, vers l'émetteur KL-108 qui la transmet au TsUP, et d'autre part vers le commutateur KL-105-2 du Compartiment de Descente, qui l'envoie sur l'écran KL-107 du panneau de contrôle. Le pilote et le TsUP voient donc exactement la même chose. 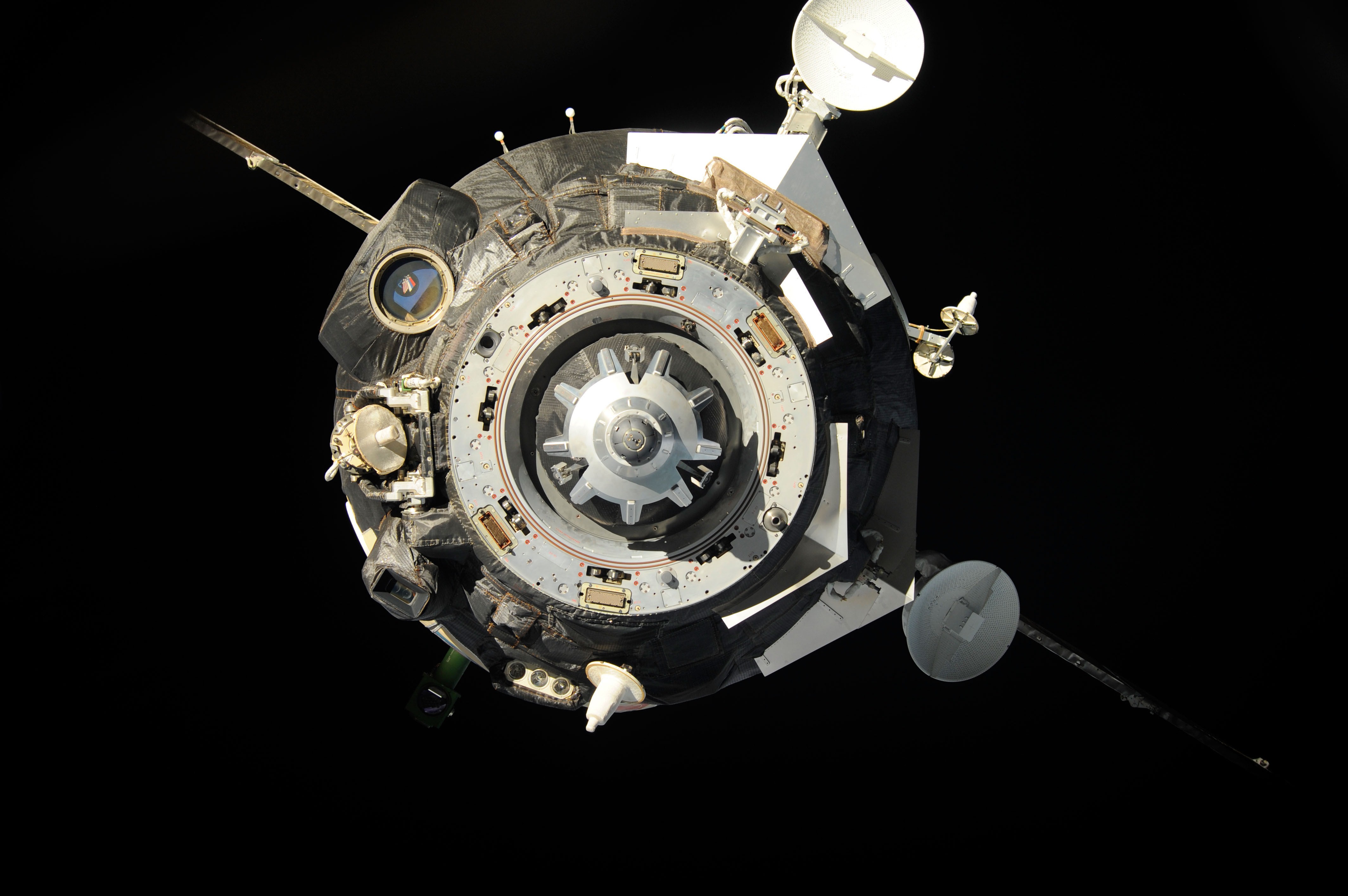
Fig. 14 : La caméra externe KL-153 du vaisseau Soyouz TMA-17. Grâce au synchroniseur KL-106, dont l'emplacement est donné sur la figure 9, l'image de la caméra externe est mélangée avec les données de l'ordinateur de bord BTsVK, qui lui arrivent au travers du processeur Simvol. Le pilote et le TsUP voient donc la fameuse image qu'on observe à chaque amarrage d'un vaisseau russe à la station Mir ou à la Station Spatiale Internationale, dont on donne un exemple sur la figure 15. 
Fig. 15 : Vue de Soyouz TMA-17 lors de son transfert du 12 mai 2010. Un mode d'éclairage (« Пересветка ») interne à la caméra KL-101-02 permet de réduire le grain de l'image. Par ailleurs, la caméra dispose de deux objectifs différents, bien visibles sur la figure 14, et le pilote peut sélectionner l'un ou l'autre en fonction de ses besoins :
- l'un à courte focale, ChU (Широкоугольный), avec un champ de vision de 64° x 50°, 4.4.Rôles de Kliost-M en situation dégradéeLe système Kliost-M est utilisé dans le cas peu probable de la rentrée atmosphérique manuelle (RUS). Si l'équipage passait en mode RUS, un processeur appelé KL-110 enverrait vers l'écran KL-107, à travers le commutateur, les données nécessaires au commandant de bord pour piloter le vaisseau. Le KL-110 est situé dans le SA, entre les casiers des parachutes. D'autre part, si le système de communication audio Rassviett tombe en panne, l'équipage peut utiliser Kliost-M en secours. Il faudrait pour cela modifier quelques connexions dans le BO. 4.5. Sur d'autres vaisseauxLa totalité de ce chapitre technique sur Kliost-M est valable pour les vaisseaux Soyouz TM. Il semble que peu, voire aucune modification n'aient été apportées sur la version Soyouz TMA. Le vaisseau de ravitaillement automatique Progress fonctionne différemment. Il ne dispose pas, bien entendu de caméra interne, car il n'y a pas d'équipage à surveiller, mais il n'a pas non plus de caméra externe à l'avant. La caméra qui lui permet de s'amarrer est installée à la place du périscope de Soyouz. Il s'agissait auparavant d'une caméra KL-140ST-PI, mais à partir de Progress M-58 elle a été remplacée par la KL-153-01. Sur les vaisseaux Progress, comme sur les Soyouz, il y a deux antennes de télévision : l'une située à l'avant du BO, l'autre à l'arrière du PAO. 
Fig. 17 : Les deux antennes de télévision du vaisseau Progress. D'autre part, les petits modules Pirs et Poïsk de la Station Spatiale Internationale disposent eux aussi d'un système de télévision Kliost-M, dont on sait peu de chose, à part qu'il pesait 20kg sur Poïsk. Pour le vaisseau de ravitaillement européen ATV, qui s'amarre au module Zvezda de la Station Spatiale Internationale, une caméra de type Kliost-M est également utilisée. Baptisée KL-154, elle est installée à l'arrière de Zvezda et permet d'obtenir des images de l'ATV lors de son approche finale. La première KL-154 était défaillante et a dû être changée lors d'une sortie dans l'Espace le 27 juillet 2010. Bibliographie
MIROCHNIKOV, M., Пятьдесят лет НИИ Телевидения, Telesputnik n°5, mai 1996. Dernière mise à jour : 5 août 2012 |
|