Soyouz | TélécommandeLe système de télécommande KRL (Командная радиолиния) du vaisseau Soyouz permet de recevoir les commandes émises par le sol et de les transmettre au système de contrôle du vaisseau (SUBK). 1. Le système de première générationLes vaisseaux Soyouz de première génération (11F615) étaient équipés d'un système KRL fourni par le NII-885 de Mikhaïl RIAZANSKI. Il communiquait avec le sol via les stations Saturn-MS, construites à l'origine pour les besoins du programme d'exploration lunaire [1]. 2. Le système de deuxième génération Kvant-VLes vaisseaux de seconde génération Soyouz T (11F732) sont équipés du système de télécommande Kvant-V, développé par le NII-885 et produit par l'usine TcheZaRa de Tchernigov, en Ukraine. Le segment sol est constitué de six stations de type Kvant-P, qui relaient les signaux émis par le Centre de Contrôle des Vols (TsUP) [1]. Les stations sont situées dans les centres suivants : - IP-5 Baïkonour 
Fig. 2.1 : La station Kvant-P du NIP-14. Le système Kvant-V reçoit les données du sol et les transmet au système de contrôle (SUBK) et à l'ordinateur de bord (BTsVK). Il permet également des liaisons dans le sens descendant, qui servent de secours aux systèmes de télémesure (SBI), de télévision (Kliost), de communications audio (Rassviett) et de mesure de trajectoire [2]. Le système Kvant-V utilise deux antennes omnidirectionnelles ABD-27 placées sur le Compartiment de Transfert (PKhO) du vaisseau, ainsi que deux antennes ABD-26 placées sur le Compartiment des Machines (AO). Quatre autres antennes sont placées sur les panneaux solaires, dont la carcasse sert elle-même d'antenne [2]. 
Fig. 2.2 : L'antenne ABD-27 de Kvant-V sur le PKhO. 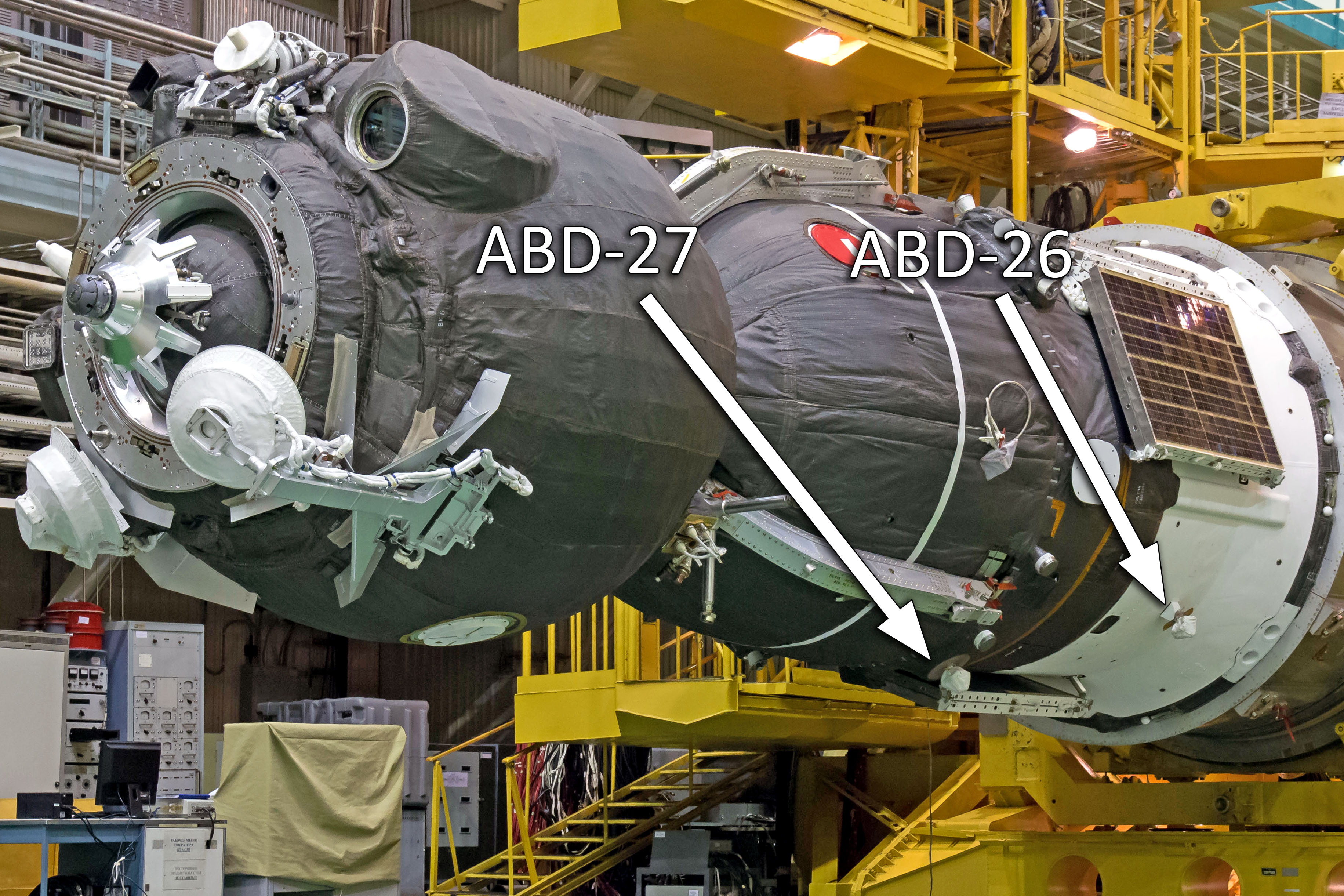
Fig. 2.3 : Les antennes de Kvant-V. Par ailleurs, une dernière antenne est placée sur le compartiment qui relie le vaisseau au lanceur. Elle permet de recevoir l'ordre qui actionne la tour d'éjection du Système de Sauvetage d'Urgence (SAS) en cas d'accident. 
Fig. 2.4 : L'antenne de Kvant-V pour l'éjection. Le système Kvant-V a une portée de 3000km, et un angle d'élévation minimale de 7°C. La réception des données numériques émises par le sol se fait avec un débit de 256kBd à la fréquence de 768,97MHz. L'émission de données du vaisseau vers le sol se fait sur la fréquence 922,76MHz. Kvant-V consomme 30W quand il est en veille, et 130W quand il est actif. Il a une masse totale de 44,5kg [2]. 3. Le système de troisième génération EKTS3.1. HistoriqueLe système Kvant-V présente deux inconvénients majeurs : il est produit en Ukraine et il ne permet de télécommander le vaisseau que quand celui-ci est visible des stations Kvant-P. De plus, lesdites stations doivent être retirées d'exploitation d'ici quelques années [6]. Par conséquent, en 2009, Roscosmos demande à la RKK Energiya de moderniser le système de télécommande de Soyouz [6]. L'entreprise RKS, anciennement NII-885, propose en 2012 son Système Unifié de Commande et de Télémesure EKTS-TKA (Единая командно-телеметрическая система транспортных космических аппаратов) [5], qui sera monté sur la nouvelle version Soyouz MS (11F732A48) du vaisseau Soyouz. Entièrement numérique, il permet au vaisseau de communiquer en bande S avec les nouvelles stations sol Klion-R, d'une part, et avec les satellites-relais Loutch-5, d'autre part. 3.2. Les stations solTrois stations Klion-R sont construites sur le territoire russe afin d'assurer les communications avec les vaisseaux Soyouz MS. La première se situe au Centre de Contrôle des Vols (TsUP) de Koroliov. La deuxième chez ISS Rechetniov, le constructeur des satellites Loutch-5, situé à Zheleznogorsk, en Sibérie [3]. La troisième est installée au centre de télémesure (KSISO) du cosmodrome de Vostotchnyi, dans l'Extrême-Orient. 


Fig. 3.2.1 : Les stations Klion-R du TsUP (à gauche), Avec ces trois stations en service, combinées aux trois satellites Loutch-5, le vaisseau est visible du TsUP durant 100% de son orbite, quelle que soit l'orbite [4]. 
Fig. 3.2.2 : Schéma du réseau EKTS (la station de Vostotchnyi n'est pas représentée). Ces trois stations sont nécessaires pour pouvoir réaliser des rendez-vous rapides en quatre orbites avec la Station Spatiale Internationale (MKS). Les deux premiers Soyouz MS ont réalisé des rendez-vous en trente-quatre orbites car ils avaient besoin de tester un certain nombre de leurs nouveaux systèmes. Le vaisseau Soyouz MS-03 devait être le premier à réaliser un rendez-vous rapide avec l'EKTS, mais la station de Vostotchnyi n'était pas prête à temps. Ce sera donc Soyouz MS-04 qui sera le premier à bénéficier des trois stations Klion-R. 3.3. Le matériel embarquéLes vaisseaux Soyouz MS sont équipés de cinq antennes. Quatre d'entre elles ne sont pas orientées : une à l'extrémité de chacun des panneaux solaires, et deux sur le Compartiment des Machines et des Instruments (PAO). Elles permettent de communiquer avec les stations Klion-R [4]. 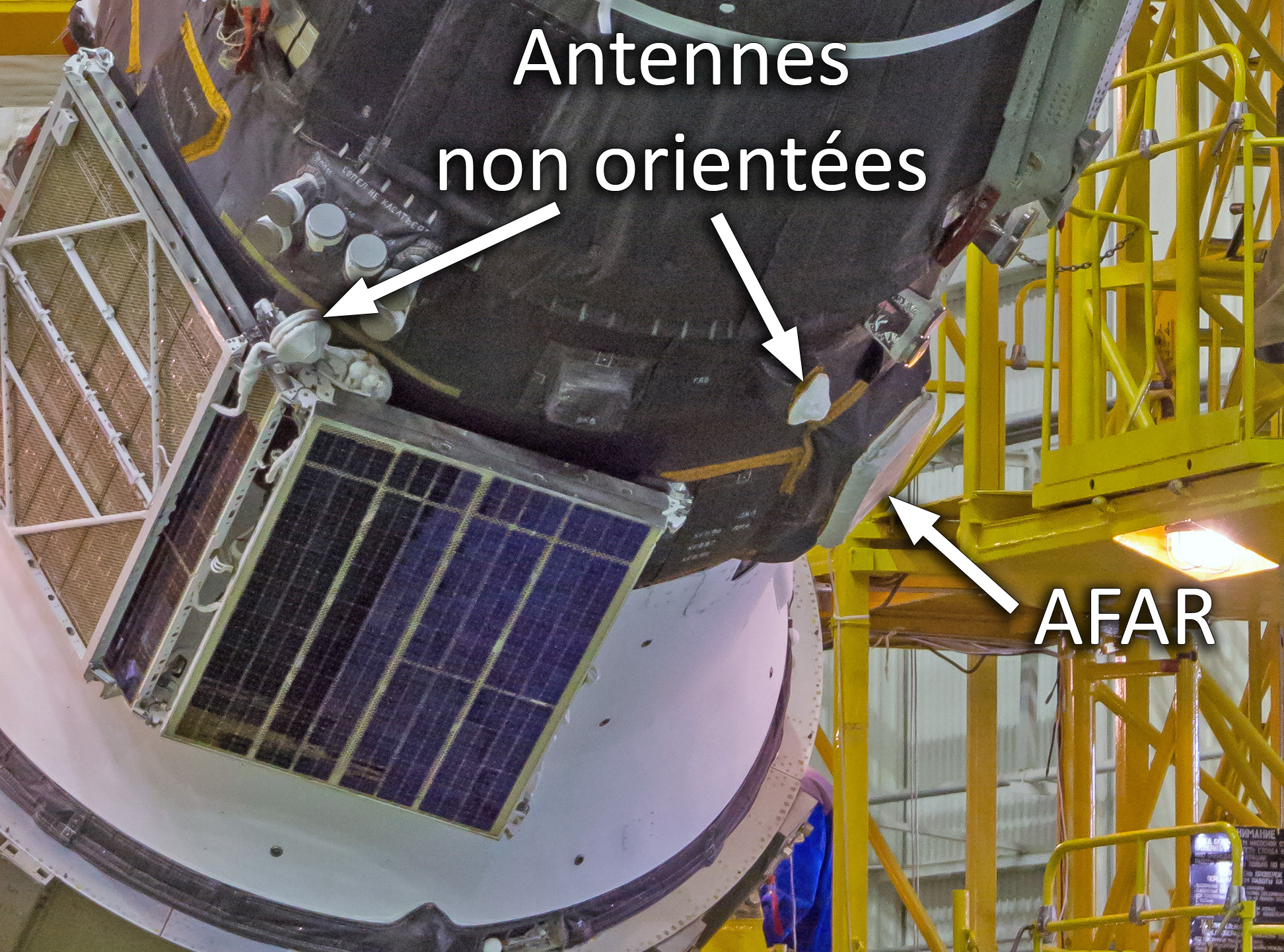
Fig. 3.3.1 : Les antennes de l'EKTS. 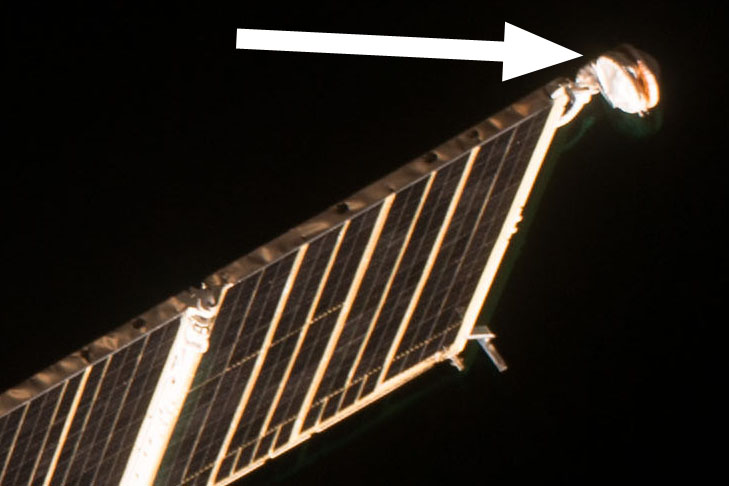
Fig. 3.3.2 : L'antenne sur le panneau solaire. La cinquième est une antenne réseau à commande de phase, appelée AFAR (Активная Фазированная Антенная Решётка). Fournie par la ZAO Merkouryi, elle permet de communiquer avec les trois satellites Loutch-5 [4]. En revanche, pour communiquer avec les Loutch-5, le vaisseau doit adopter une orientation particulière, de façon à ce que l'AFAR pointe dans leur direction. Lors d'un rendez-vous en trente-quatre orbites avec la Station Spatiale Internationale (MKS), les Soyouz MS suivent un mode d'orientation qui maintient les panneaux solaires en direction du Soleil. Dans ce mode d'orientation, les communications par satellite ne sont donc pas possibles [4]. De plus, les communications par satellite ne sont pas non plus possibles pendant les allumages des moteurs pour des corrections d'orbite, qui nécessitent une orientation particulière [4]. 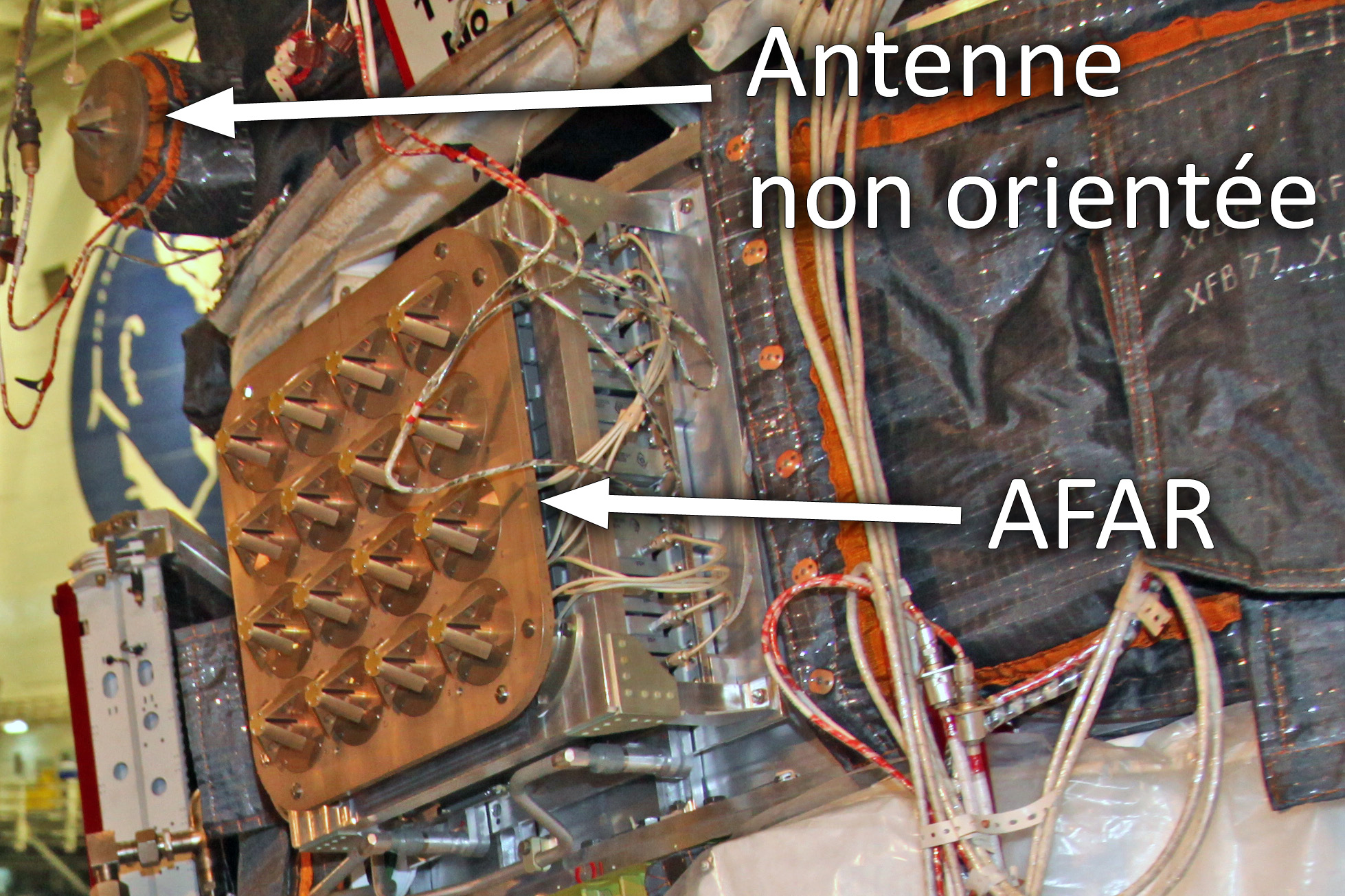
Fig. 3.3.3 : L'antenne AFAR. Outre les cinq antennes, le système EKTS est constitué d'un transpondeur en bande S et d'un boîtier de traitement du signal, qui répond à la norme SNUG 530 que la NASA utilise pour son réseau TDRS, avec lequel l'EKTS est donc compatible [5]. L'ensemble est installé dans le Compartiment des Machines et des Instruments (PAO) du vaisseau Soyouz MS. 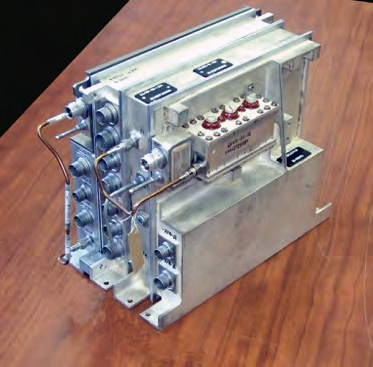
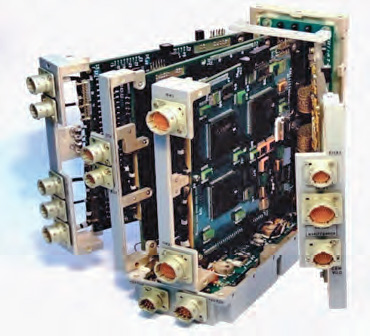
Fig. 3.3.4 : Le transpondeur (à gauche) et le boîtier de traitement de l'EKTS-TKA. 
Fig. 3.3.5 : Le système EKTS-TKA au complet. Le système de communications audio Rassviett-3BM et le système de télémétrie MBITS sont reliés à l'EKTS [6]. Bibliographie
[1] STARTSEV, V., Вклад ОАО "РКС" в создание пилотируемых космических и орбитальных станций, in PERVOV, M., История развития отечественной пилотируемой космонавтики, Moscou, 2015 Dernière mise à jour : 25 septembre 2016 |
|