Soyouz | AtterrissageLe système d'atterrissage KSP (Комплекс Средств Посадки) rassemble les différents éléments qui assurent le retour du Compartiment de Descente (SA), depuis l'instant où il se sépare des deux autres compartiments jusqu'à l'instant du contact avec le sol. Il peut être utilisé soit dans le cas d'une rentrée dans l'atmosphère après un vol orbital, soit dans le cas d'une éjection du vaisseau par le système de secours SAS suite à un accident avec le lanceur. Le KSP est constitué :
- du système de parachute primaire (OSP), 1. Le système de parachute primaire (OSP)Le système de parachute primaire OSP (Основная Система Парашютов) permet au Compartiment de Descente (SA), dont la masse est comprise entre 2800kg et 3100kg, d'atterrir avec une vitesse de 6,5m/s [1]. Il est constitué :
- du parachute de tirage VP (Вытяжной Парашют), Ces trois parachutes sont fournis par le NII Parachioutostroïenia (anciennement NIEI PDS) de Moscou. Ils sont situés dans un container hermétique, placé à l'extérieur du SA, mis à la pression atmosphérique avant le décollage. 
Fig. 1.1 : Construction du container de l'OSP chez la RKK Energiya. Après la rentrée dans l'atmosphère, alors que le SA tombe avec une vitesse de 230m/s, le couvercle du container est éjecté au moyen de 16 boulons pyrotechniques, ce qui provoque automatiquement le déploiement des parachutes de tirage, rattachés au couvercle par une corde. Ces parachutes de petites tailles (4,2m² et 0,62m² [2]) permettent d'extraire le parachute de freinage qui, avec une voile de 24m² [2], abaisse la vitesse de chute à 90m/s [1]. 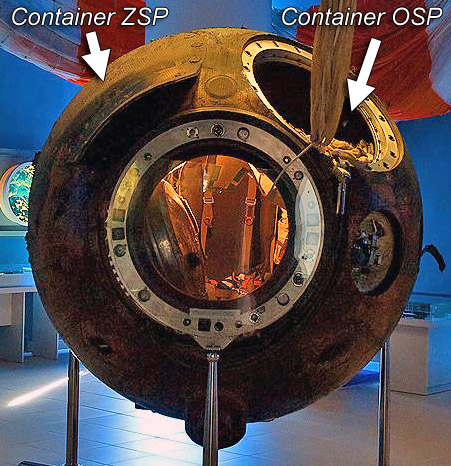
Fig. 1.2 : Le vaisseau Soyouz-22 avec ses containers pour les parachutes primaire (OSP) et secondaire (ZSP). 
Fig. 1.3 : Les logements de deux des seize boulons explosifs Cette vitesse autorise le déploiement du parachute principal, dont la voile de 1000m² permet d'abaisser encore la vitesse à 7,6±1,5m/s [2]. Le container étant situé sur le côté du SA, celui-ci est incliné lors de la descente. Cet angle lui permet de mieux évacuer la chaleur accumulée lors de la rentrée dans l'atmosphère. Au bout d'un certain laps de temps, une deuxième suspente est libérée et permet de revenir à une configuration symétrique. 

Fig. 1.4 : Largage du parachute de freinage. Vidéo 1 : Séquence de déploiement de l'OSP. 
Fig. 1.5 : Soyouz TMA-11M après son atterrissage. 
Fig. 1.6 : Le point d'attache de la deuxième suspente de Soyouz-28. 
Fig. 1.7 : Soyouz TMA-08M en configuration symétrique sous ses deux suspentes. 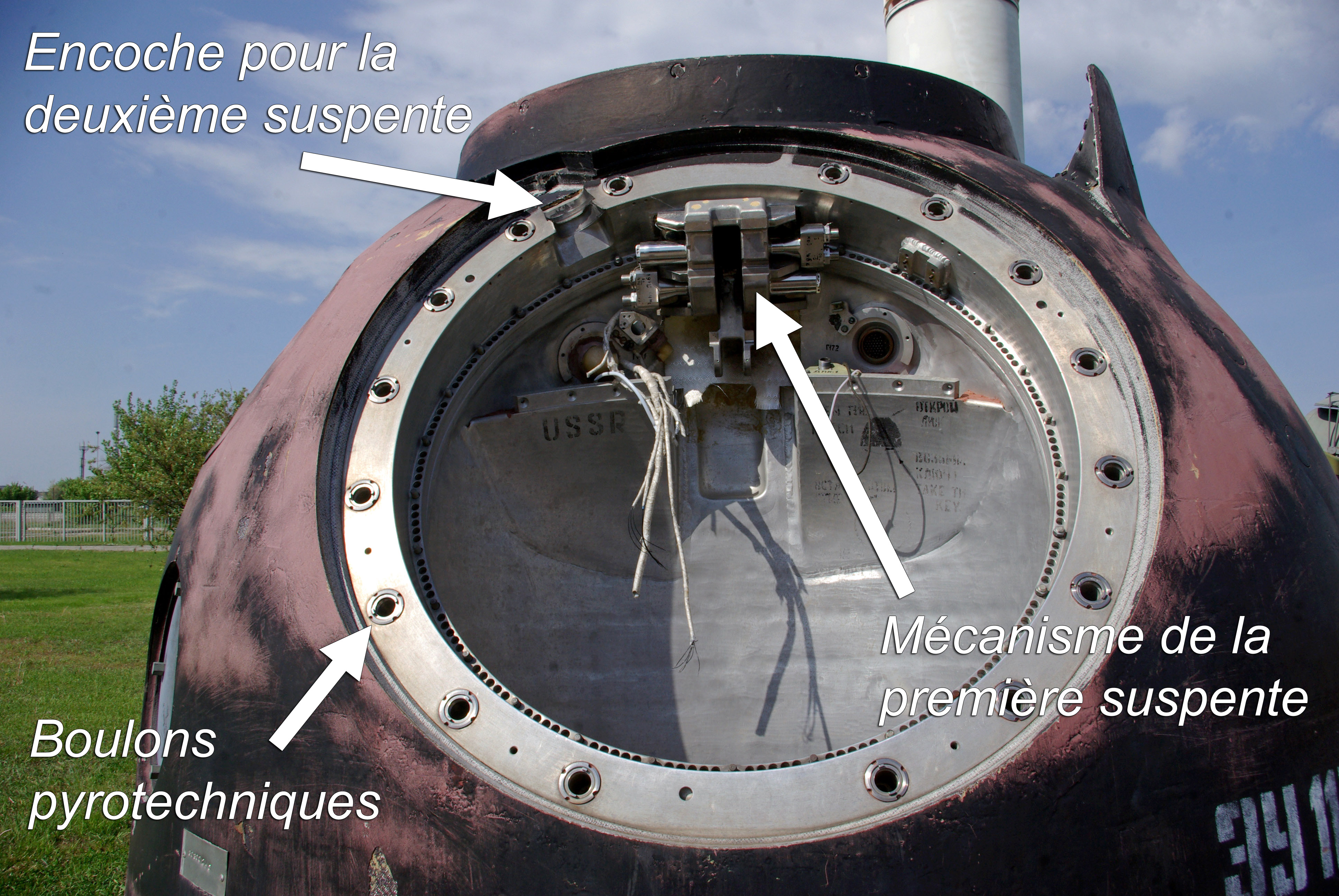
Fig. 1.8 : Le container de l'OSP. 
Fig. 1.9 : Le parachute principal de Soyouz TMA-14. Lors de la descente, après le déploiement du parachute principal, un ballon est gonflé dans le compartiment de l'OSP. Son rôle est d'assurer la flottaison du SA en cas d'amerrissage [1]. Sans lui, en effet, de l'eau s'engouffrerait dans le compartiment et alourdirait le SA, qui coulerait. Ce ballon est gonflé grâce à une bouteille d'air sous pression. Si la descente se déroule normalement avec l'OSP, la bouteille du compartiment ZSP est éventée (et vice versa) [1]. 
Fig. 1.10 : Soyouz TMA-19 après son atterrissage. 2. Le système de parachute secondaire (ZSP)Le système de parachute secondaire ZSP (Запасная Система Парашютов) permet au Compartiment de Descente (SA) d'atterrir en toute sécurité en cas de défaillance du système de parachute primaire (OSP). Il est constitué de deux parachutes de tirage (VP) et d'un parachute de freinage (TP), qui sont identiques à ceux de l'OSP. En revanche, pour des raisons d'encombrement, le parachute principal (OP) a une voile plus petite de seulement 590m² [2]. 
Fig. 2.1 : Le compartiment du ZSP, avec son cordon pyrotechnique. Le ZSP est stocké dans un compartiment hermétique à l'extérieur du SA (fig. 1.2). Du fait de sa voile plus petite, la vitesse du SA lors de l'atterrissage avec le ZSP est de 9,5±1,5m/s [2]. L'ouverture du ZSP est commandée par le système de commande AKSP s'il détecte une vitesse de chute supérieure à 18m/s. Le compartiment du ZSP possède également un ballon pour assurer la flottaison du SA en cas d'atterrissage [1]. 3. Les moteurs d'atterrissage en douceur (DMP)Le Compartiment de Descente (SA) du vaisseau Soyouz descend dans l'atmosphère à la vitesse de 7,6±1,5m/s quand il utilise le parachute primaire (OSP) [2], et à la vitesse de 9,5m/s avec le parachute secondaire (ZSP). A cette vitesse, le contact avec le sol est supportable par l'équipage, mais particulièrement violent. Le SA est donc doté de moteurs d'atterrissage en douceur DMP (Двигатель Мягкой Посадки) qui permettent d'amortir le choc. Ils fonctionnent indifféremment que l'atterrissage ait lieu sur la terre ferme ou en mer (voir la vidéo 4). Les vaisseaux Soyouz de première génération (11F615) possédaient quatre DMP, numérotés D1 à D4. Il s'agissait de moteurs à propergol solide 11D830 fournis par le MKB Iskra. 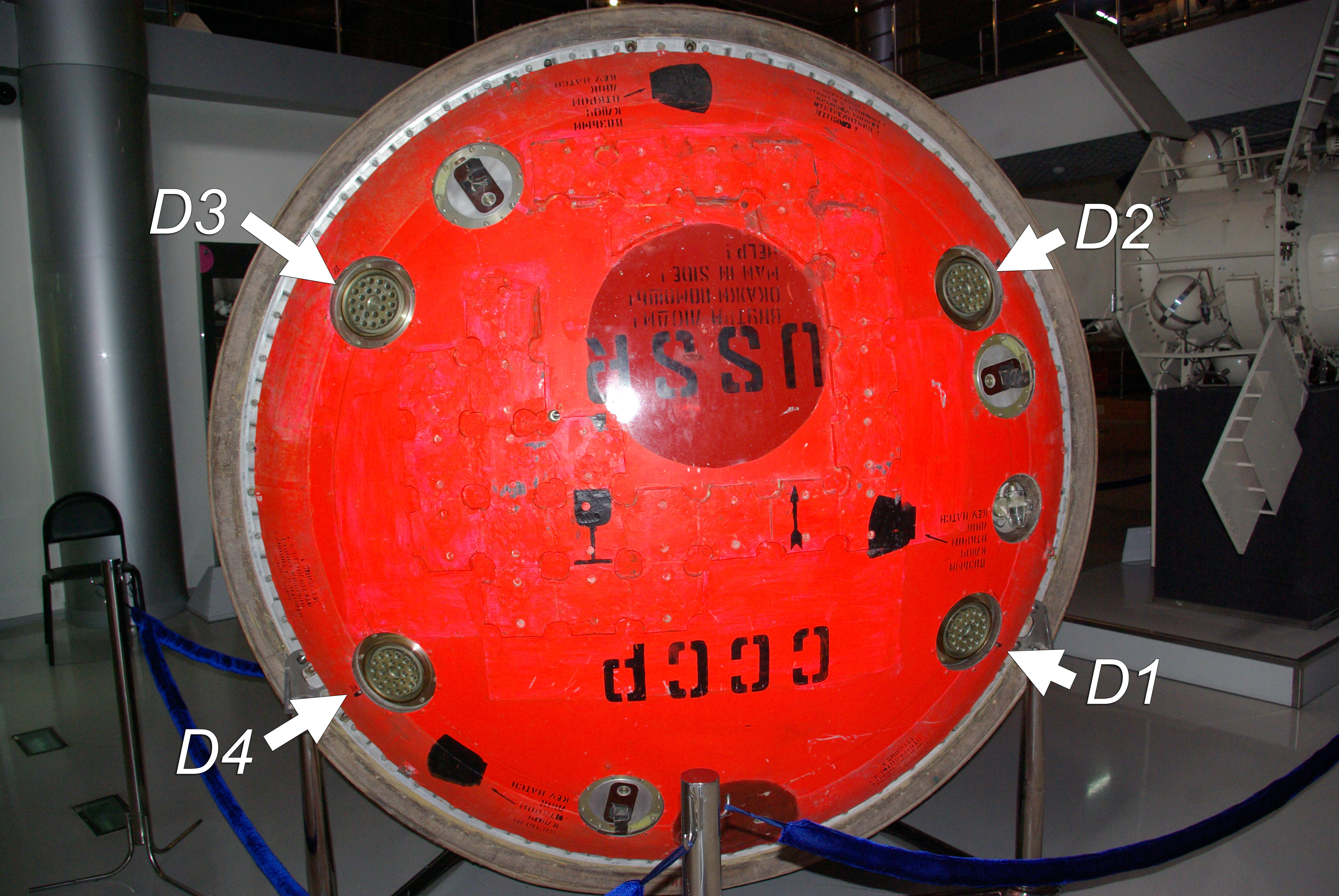
Fig. 3.1 : Les quatre moteurs DMP du vaisseau Soyouz-37. 
Fig. 3.2 : Un moteur 11D830. 

Fig. 3.3 : Les moteurs DMP des vaisseaux Soyouz-25 (à gauche) et Soyouz-37. Sur les vaisseaux de deuxième génération Soyouz T (11F732), deux moteurs DMP supplémentaires ont été ajoutés pour augmenter la fiabilité. Les six moteurs, qui sont maintenant des 11D839, sont répartis en deux groupes de trois, de part et d'autre du SA. Lors d'un atterrissage nominal avec le parachute primaire, seuls quatre DMP sont allumés, et permettent d'abaisser la vitesse du SA à 2m/s [1]. Les deux derniers moteurs ne sont utilisés que dans le cas d'un atterrissage avec le parachute secondaire, afin d'amortir le surplus de vitesse. Sur les vaisseaux Soyouz TM (11F732A51), le principe reste le même, à ceci près qu'une nouvelle version des DMP est utilisée, les 11D839M, toujours fournis par le MKB Iskra. Ils développent une poussée de 375kgf.s [3]. 

Fig. 3.4 : Les moteurs DMP de Soyouz TM-7. 

Fig. 3.5 : Un moteur 11D839M. Lors de l'atterrissage du vaisseau Soyouz TM-25 avec Vassili TSIBLIEV et Aleksandr LAZOUTKINE, le 14 août 1997, les moteurs DMP n'ont pas fonctionné, et l'équipage a subi un violent choc. Le SA a été déformé, et si un troisième cosmonaute avait été présent, il aurait pu être blessé. 
Fig. 3.6 : Coupe d'un moteur 11D839M. 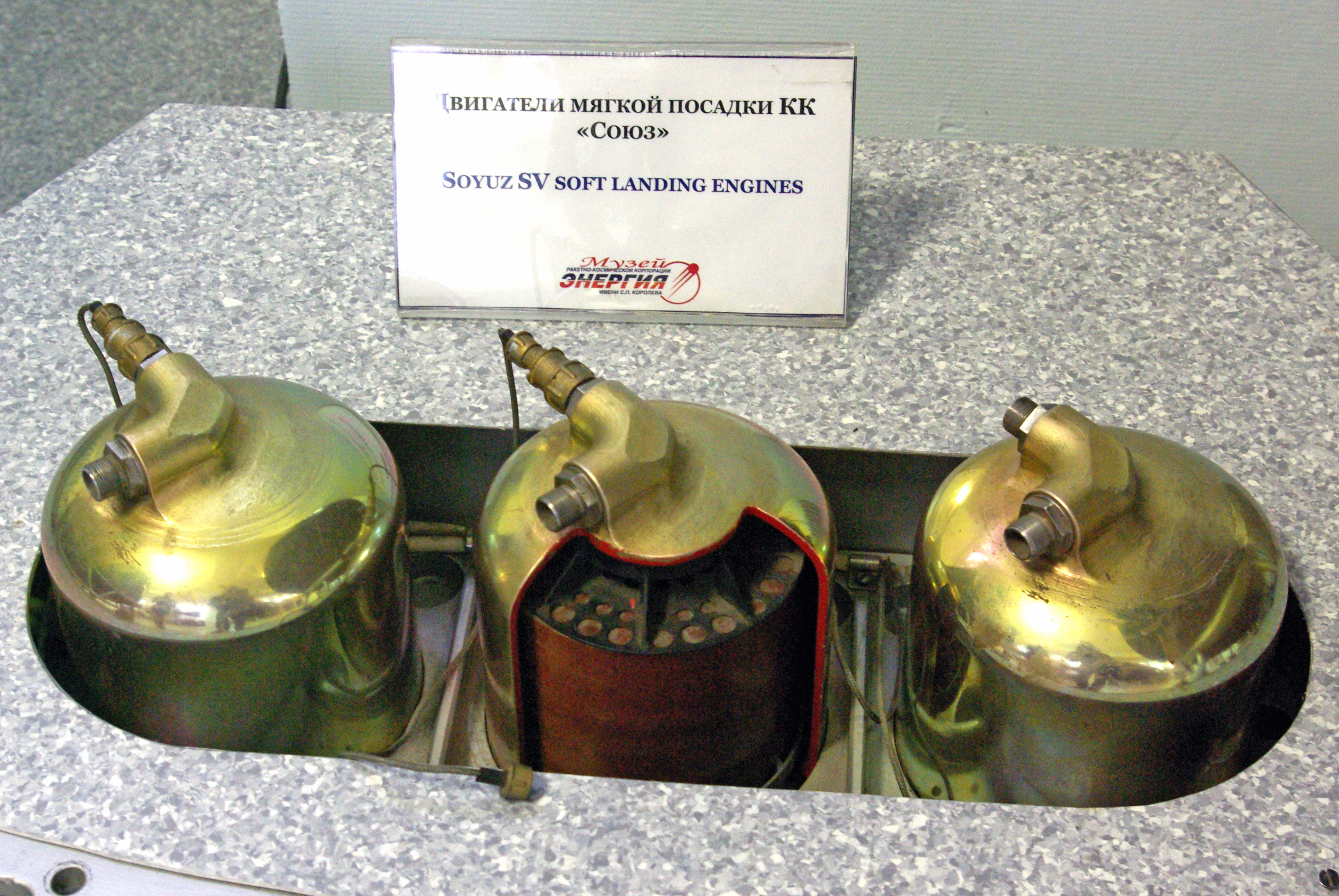
Fig. 3.7 : Trois moteurs DMP en coupe. Sur la version Soyouz TMA (11F732A17) introduite en 2002, quatre DMP classiques sont conservés, mais deux autres sont remplacés par une version modifiée. Ces nouveaux moteurs, appelés DMPM, peuvent fonctionner selon trois modes distincts, car ils sont séparés en deux sections :
- la section n°1, au centre, développe une poussée de 85kgf.s, Ainsi, selon le type d'atterrissage, la poussée fournie est modulée en allumant la section n°1, la section n°2 ou les deux sections. Les différents scénarios sont listés dans le tableau 1. Dans tous les cas, les quatre DMP classiques sont allumés systématiquement. Cette modification permet de diminuer par deux la décélération subie par l'équipage au moment du contact avec le sol, qui est maintenant de 5 à 7g [10].

Fig. 3.8 : Allumage des DMP et des DMPM lors de l'atterrissage de Soyouz TMA-08M. 
Fig. 3.9 : Schéma d'un DMP. Vidéo 2 : Allumage des DMP et des DMPM de Soyouz TMA-21. 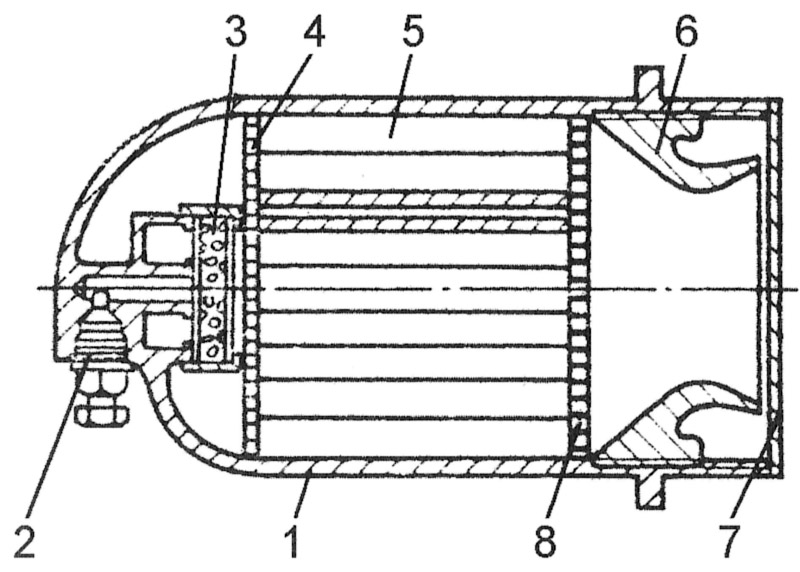
Fig. 3.10 : Schéma d'un DMP. Après l'atterrissage, les moteurs non utilisés sont démontés par les équipes de récupération par mesure de sécurité, afin d'assurer qu'ils ne s'allument pas intempestivement lors du transfert du SA vers Koroliov. 
Fig. 3.11 : Les deux DMP non utilisés de Soyouz TMA-20M, le 7 septembre 2016. 4. Les couchettes KazbekDans le Compartiment de Descente (SA), les cosmonautes sont installés dans des couchettes individuelles de type Kazbek-U, fournies par la NPP Zvezda. Elles sont équipées d'un amortisseur qui permet de réduire l'effort sur le corps du cosmonaute lors du contact avec le sol. 
Fig. 4.1 : Une couchette Kazbek-U. Dans la couchette, le cosmonaute doit adopter une position repliée, imposée à la fois par les dimensions réduites du SA et par la nécessité de se protéger contre la forte décélération lors du contact avec le sol. Pendant le lancement et le vol en orbite, les Kazbek-U sont en position non armée afin de maximiser le volume habitable du SA. Lors de la descente dans l'atmosphère, quand l'automatisme AKSP mesure une altitude inférieure à 5,5km, il envoie la commande d'armement des couchettes. 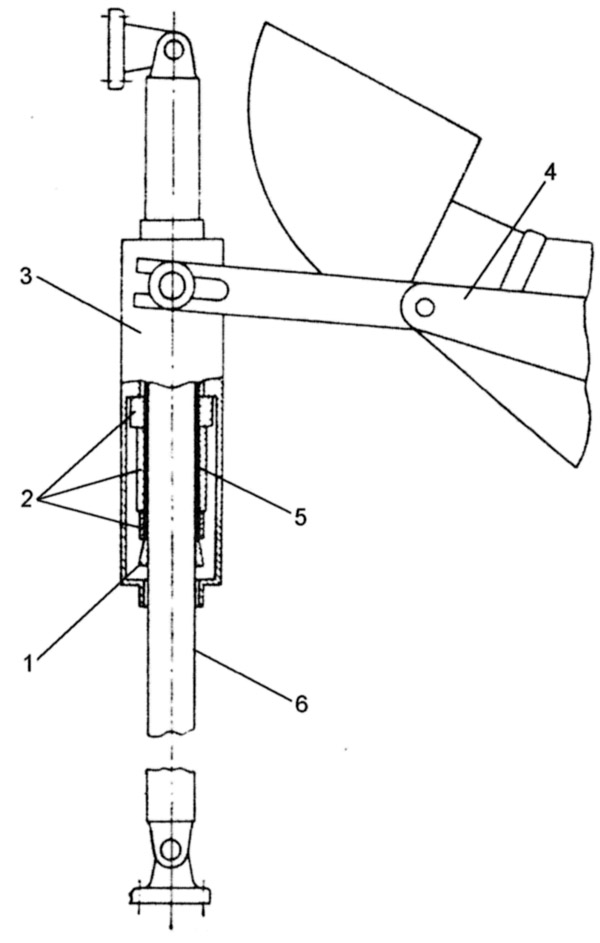
Fig. 4.2 : Le mécanisme d'amortissement de la couchette Kazbek-U. Cet ordre a pour effet de relever la couchette, ce qui permettra à l'amortisseur de remplir son rôle lors du contact avec le sol. Comme on le voit sur la figure 4.1, la couchette Kazbek-U est également équipée d'une poignée bleue qui permet d'utiliser le canal de secours du système de communication Rassviett. Vidéo 3 : Armement des Kazbek-UM lors de l'atterrissage de Soyouz TMA-07M. 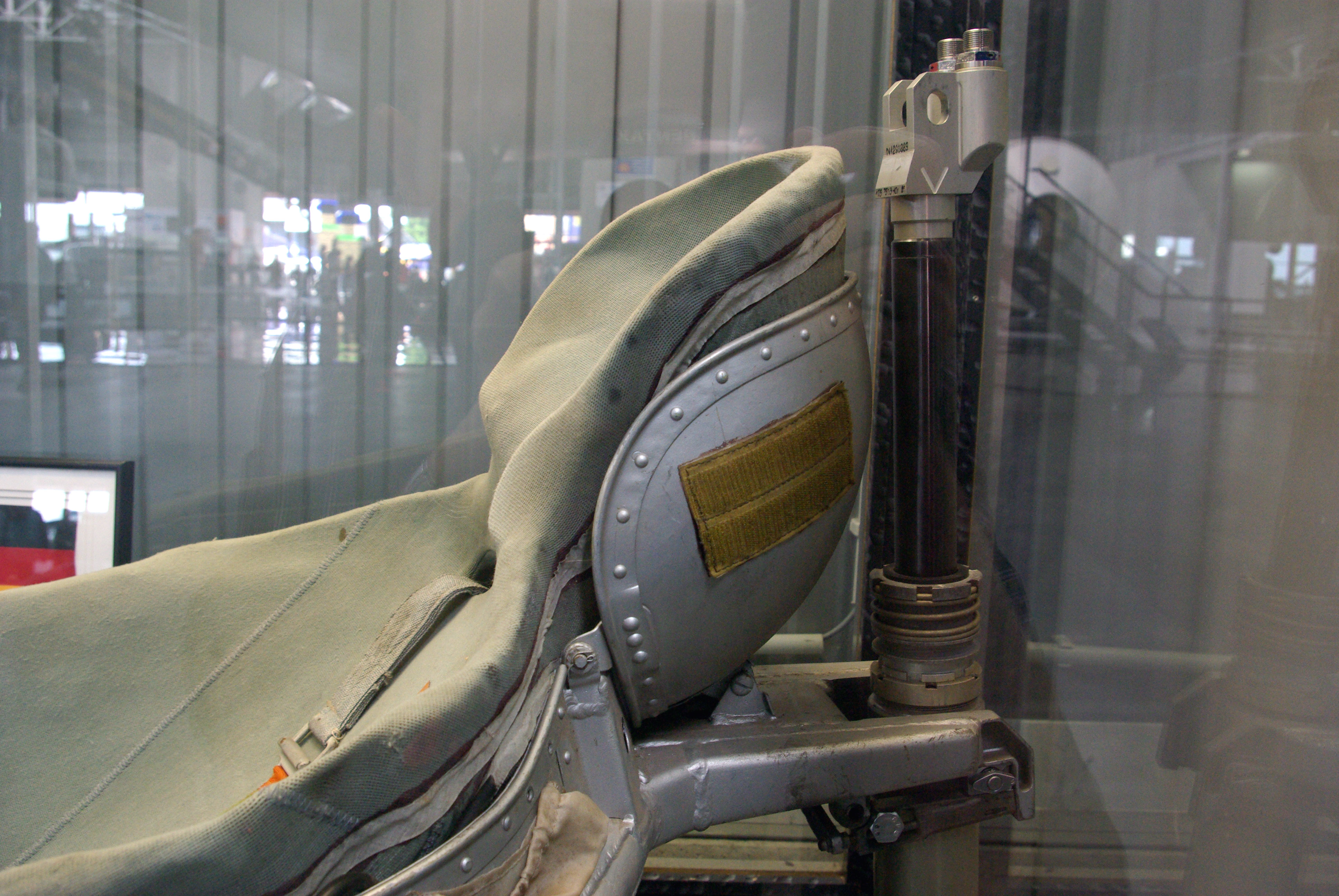

Fig. 4.3 : Couchette Kazbek-U en positions désarmée (à gauche) et armée (à droite). La couchette Kazbek-U est équipée d'un logement moulé individuellement pour chaque cosmonaute. Cette personnalisation permet de s'assurer que le corps du cosmonaute épousera parfaitement la forme de la couchette, ce qui assure une protection optimale contre le choc de l'atterrissage. 

Fig. 4.4 : Logement d'une couchette Kazbek-U. 

Fig. 4.5 : Moulage du logement de la couchette Kazbek-U pour Esther DYSON. A partir de la version Soyouz TMA (11F732A17), développée spécifiquement pour admettre des cosmonautes ayant des mensurations plus variées, la couchette Kazbek a été agrandie de 50mm [4]. Cette nouvelle version est baptisée Kazbek-UM.
Afin d'accompagner ces relaxations sur les paramètres physiologiques des cosmonautes, le système d'amortissement a été modifié. Il comprend maintenant plusieurs positions : léger (Л), moyen (С), semi-lourd (ПТ) et lourd (Т). 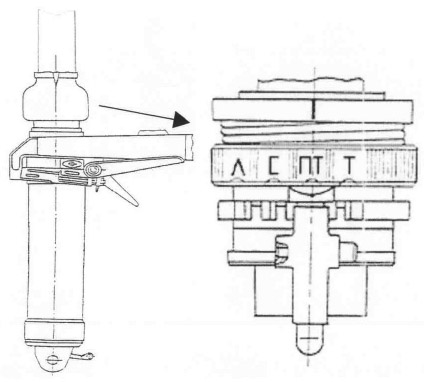
Fig. 4.6 : Le sélecteur de poids du système d'amortissement de la Kazbek-UM. 5. Le système de commande (AKSP)Le système d'atterrissage KSP est commandé par l'ensemble AKSP (Автоматика КСП), constitué d'un capteur barométrique et d'un altimètre. L'AKSP est armé automatiquement par la commande SEPARATION générée au moment de la séparation des trois compartiments, avant la rentrée dans l'atmosphère. Si, pour une raison ou une autre, l'armement automatique n'est pas réalisé, l'équipage peut le faire manuellement (sur le Soyouz TM, c'est la commande ASP en position F1 sur le pupitre KSP-P) [1]. 5.1. Le capteur barométriqueIl mesure la pression atmosphérique en temps réel et donne l'ordre de largage du couvercle du compartiment du parachute primaire (OSP), ce qui initie sa séquence de déploiement. Le capteur barométrique est redondé (BBR-1 et BBR-2). Il est associé à un chronomètre, redondé trois fois (PVM1-1, PVM1-2, PVM1-3), qui lui permet de calculer la vitesse de descente après le déploiement théorique de l'OSP. Si, pendant une période de mesure dt=55±1,5", l'élévation de la pression atmosphérique est inférieure à dP=54mmHg, l'AKSP en déduit que la vitesse de descente est inférieure à 18m/s, et que l'OSP est correctement déployé et assure sa fonction [1]. 
Fig. 5.1.1 : Le capteur barométrique BB-2. En revanche, si l'AKSP mesure une élévation de pression de 54mmHg pendant une période inférieure à dt=55±1,5", il en déduit que le Compartiment de Descente (SA) tombe trop vite, et donc que l'OSP n'est pas déployé correctement. Il émet donc la commande ÉCHEC, qui initie le déploiement du parachute secondaire (ZSP) [1][2]. Le capteur barométrique est fourni par la société Aeropribor-Voskhod (anciennement OKB-133), basée à Moscou. Peu d'informations ont été diffusées sur l'historique de ce capteur, dont il semblerait que quatre versions se sont succédées dans l'histoire des Soyouz [5] : SVsRT-1, SVsR-4, BB et BB-2 (ce dernier ayant été développé pour la version Soyouz TMA [4]). Nota : l'histoire officielle de la RKK Energiya évoque aussi un commutateur BKSP du Soyouz TM qui, sur Soyouz TMA, a été séparé en deux systèmes distincts, le BLSP et le BKPSP. On ne connait toutefois pas le rôle précis de ces matériels, si ce n'est qu'ils contrôlent les moteurs DMP et l'altimètre Kaktus [4]. 5.2. L'altimètre KaktusKaktus est un altimètre à rayons gamma (GLV, Гамма-Лучевой Высотомер) dont le rôle est de déclencher l'allumage des moteurs d'atterrissage en douceur (DMP) quand le Compartiment de Descente (SA) atteint l'altitude de 80cm. Il est fourni par le TsNII RTK de Saint-Pétersbourg. Il est constitué d'un émetteur, avec une source de Césium 137 (137Cs) qui rayonne dans toutes les directions, et d'un récepteur qui capte une petite partie (10-8) de l'énergie réfléchie par le sol [6]. 
Fig. 5.2.1 : Le récepteur de Kaktus (à gauche) et son émetteur (à droite). 
Fig. 5.2.2 : Principe de fonctionnement du système Kaktus. L'utilisation des rayons gamma est rendue indispensable pour satisfaire la double exigence de précision et de polyvalence que doit avoir le système Kaktus. En effet, un système à ondes radio ne serait pas suffisamment précis, et un système laser ne fonctionnerait pas en cas de présence de nuages [6]. 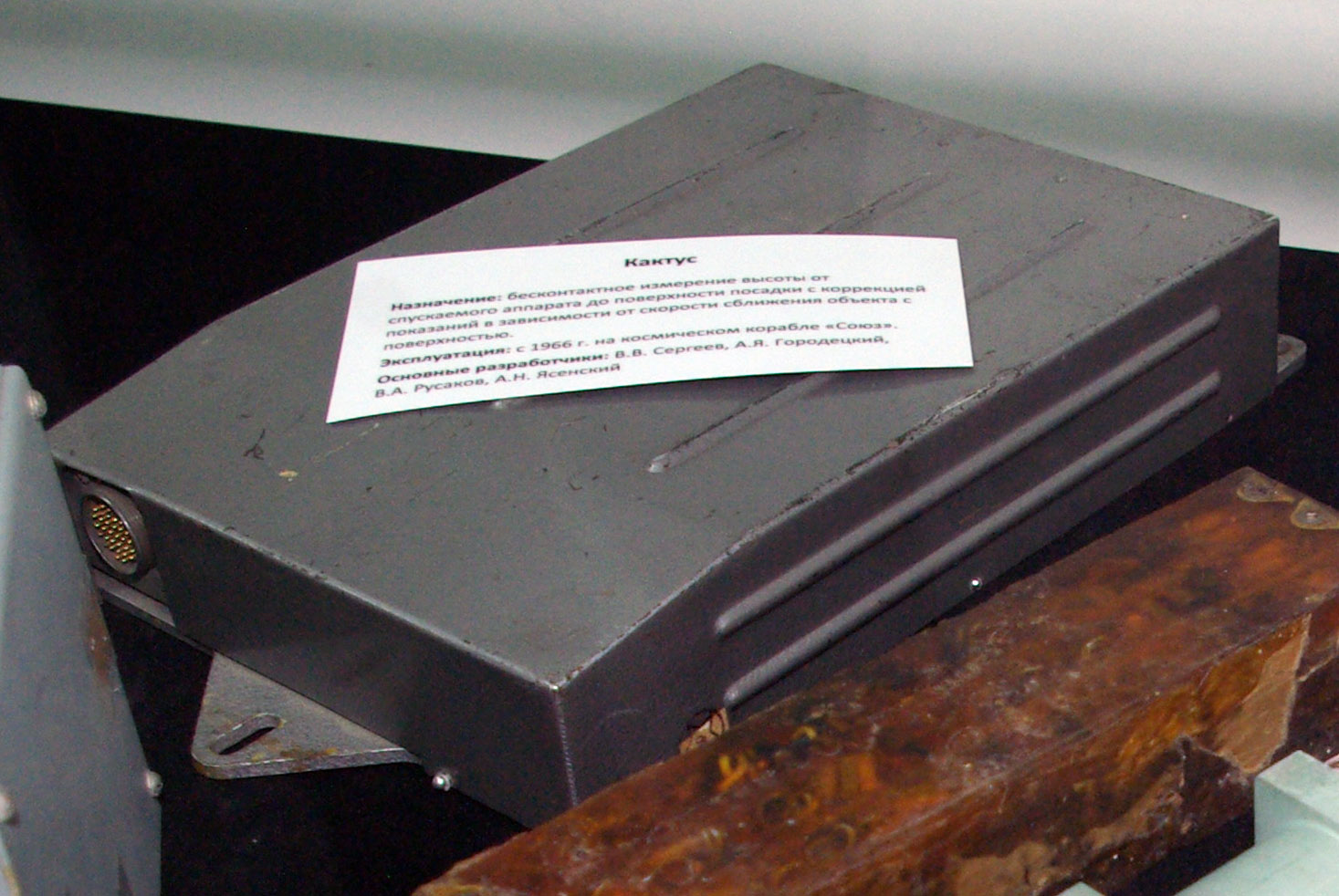
Fig. 5.2.3 : Le récepteur du système Kaktus. A un certain moment, le Kaktus a été remplacé par une version améliorée Kaktus-1V. A partir de Soyouz TMA-M (11F732A47), la version embarquée s'appelle Kaktus-2V. Il est développé par le TsNII RTK dans le cadre d'un contrat signé le 3 septembre 2009 avec la RKK Energiya [7]. Sa principale différence par rapport à Kaktus-1V est dans le traitement de l'information, qui est maintenant numérique [6]. De plus, il prend en compte la vitesse de descente du SA, ce qui lui permet d'adapter sensiblement l'instant d'allumage des DMP [3]. Le Kaktus-2V a été testé en mode télémesure sur les vaisseaux Soyouz TMA-08M et Soyouz TMA-09M [7][8]. Il a été utilisé pour la première fois en mode opérationnel sur le vaisseau Soyouz TMA-17M. 
Fig. 5.2.4 : Le récepteur du système Kaktus-2V. L'utilisation du Césium 137 ne pose pas de problème de radioprotection pour l'équipage, qui n'est pas atteint par les rayons gamma grâce à une couche de protection placée autour de la source [6]. En revanche, le problème se pose pour les équipes de récupération (FPSU), qui sont exposées à la face non protégée du Compartiment de Descente (SA) après son atterrissage. Afin de limiter l'exposition des personnels des FPSU, un bouclier de protection est placé devant l'émetteur du système Kaktus. Au cas où le SA atterrirait dans une zone habitée, un affichage permet d'avertir d'éventuels riverains qu'il est dangereux de s'approcher de la face inférieure du vaisseau. 
Fig. 5.2.5 : Mise en place du bouclier de protection devant l'émetteur Afin de faciliter l'installation du bouclier de protection, la face inférieure du SA est munie de six accroches. Ces dernières sont apparues avec la version Soyouz T (11F732). 
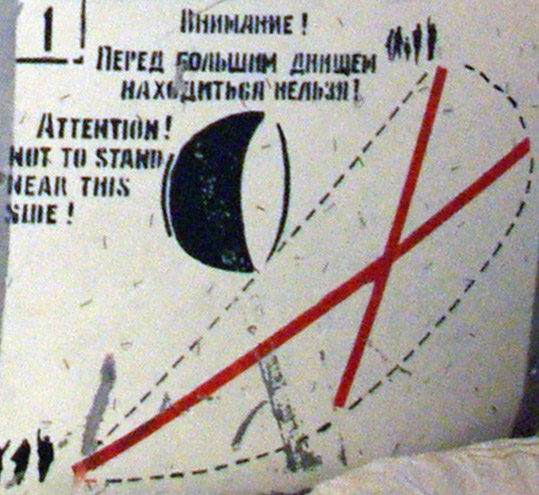
Fig. 5.2.6 : Les accroches sous le SA et le
message d'avertissement. Au cours de l'histoire du vaisseau Soyouz, l'altimètre Kaktus a subit deux défaillances : lors de l'atterrissage de Soyouz-35 et lors de celui de Soyouz TM-25. 6. Séquence d'atterrissageLe système d'atterrissage KSP est armé par la commande de séparation des compartiments du vaisseau Soyouz, qui intervient à environ 130km d'altitude. Si l'armement n'est pas effectif, l'équipage a la possibilité de le confirmer manuellement. Quand le SA arrive à l'altitude de 80km, le plasma qui se forme autour de lui empêche les communications radio, et ce jusqu'à l'altitude d'environ 40km. Cette phase dure environ quatre minutes [9]. Quand le capteur barométrique mesure une pression atmosphérique de 133mmHg, qui correspond à une altitude de 10,5km, l'AKSP lance la séquence d'ouverture de l'OSP. C'est l'instant H0. Le couvercle du compartiment de l'OSP est éjecté par les boulons pyrotechniques, entraînant avec lui les parachutes de tirage qui se déploient, et extraient le parachute de freinage. 16,5 secondes plus tard, le parachute de freinage est largué, ce qui entraîne le déploiement du parachute principal, qui prend trois secondes. Le SA est alors en configuration dite asymétrique, car le parachute principal est ancré sur son flanc. A l'altitude de 6,5km, l'AKSP commence à calculer la vitesse de chute. Si elle est supérieure à 18m/s, il en déduit que le parachute principal ne s'est pas déployé, ou ne s'est pas déployé correctement, et il émet la commande ÉCHEC (aller en 6.2). 6.1. Atterrissage avec l'OSPSi la vitesse de chute est inférieure à 18m/s, l'AKSP considère que la descente est nominale. A l'altitude de 5,5km, il réalise un certain nombre d'actions :
- il largue le bouclier thermique afin d'alléger le SA et de découvrir les moteurs d'atterrissage en douceur (DMP) et l'altimètre Kaktus, Vidéo 4 : Essai de largage en mer d'un Soyouz TM, avec simulation d'un échec de l'OSP. Le largage du bouclier thermique initie un ordre d'éventage du peroxyde d'hydrogène des réservoirs du système SIOS, afin de ne pas mettre en danger les équipes de récupération. Le vaisseau entre alors dans la phase finale de la séquence d'atterrissage. A l'altitude de 80cm, l'altimètre Kaktus envoie l'ordre de mise en service des moteurs DMP, et l'inhibition du largage manuel du parachute principal est désactivée. Le risque est que, après l'atterrissage, le SA soit traîné sur le sol par le parachute. Il est donc important de donner la possibilité à l'équipage de le larguer dès que possible. 
Fig. 6.1.1 : Le bouclier thermique de Soyouz TMA-15. C'est aussi à 80cm d'altitude que l'ordre de mise en service du système de ventilation SDV (Система Дыхательной Вентиляции) est envoyé. Le contact avec le sol est détecté par le capteur de choc UD (Ударный Датчик), qui provoque l'apparition d'une alarme sur le pupitre du vaisseau. L'équipage commande alors la rupture de l'une des suspentes du parachute principal [1].
6.2. Atterrissage avec le ZSPSi l'AKSP calcule une vitesse de descente supérieure à 18m/s, il en déduit que l'OSP n'est pas fonctionnel et commande le largage de son parachute principal. Il envoie ensuite l'ordre de largage du couvercle du compartiment du ZSP, ce qui provoque le déploiement des parachutes de tirage, du parachute de freinage et, in fine, du parachute principal. La séquence est ensuite la même qu'avec l'OSP. Les actions qui, avec l'OSP, sont réalisées à 5,5km d'altitude le sont ici à 3,5km d'altitude.
Bibliographie
[1] Soyuz Crew Operations Manual, disponible sur le forum NasaSpaceFlight L2 Dernière mise à jour : 21 novembre 2016 |
| |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||