Le support mobile MBSLe bras SSRMS peut opérer depuis un point fixe (PDGF), mais il peut aussi s'arrimer à un support mobile qui lui permet de se déplacer le long de la poutre centrale de la station (ITS). Ce support mobile est appelé MBS (Mobile Remote Servicer Base System). 1. GénéralitésLe MBS est posé sur le transporteur mobile (MT) qui lui confère sa capacité de déplacement. Il a été apporté lors de la mission Endeavour STS-111, en juin 2002. Il se présente sous la forme d'une plate-forme équipée de différents systèmes. Il a une longueur de 5,7m pour une largeur de 2,9m et une masse de 1500kg. Son coût est estimé à environ 250M$. Il a été développé sous maîtrise d'œuvre de MD Robotics. 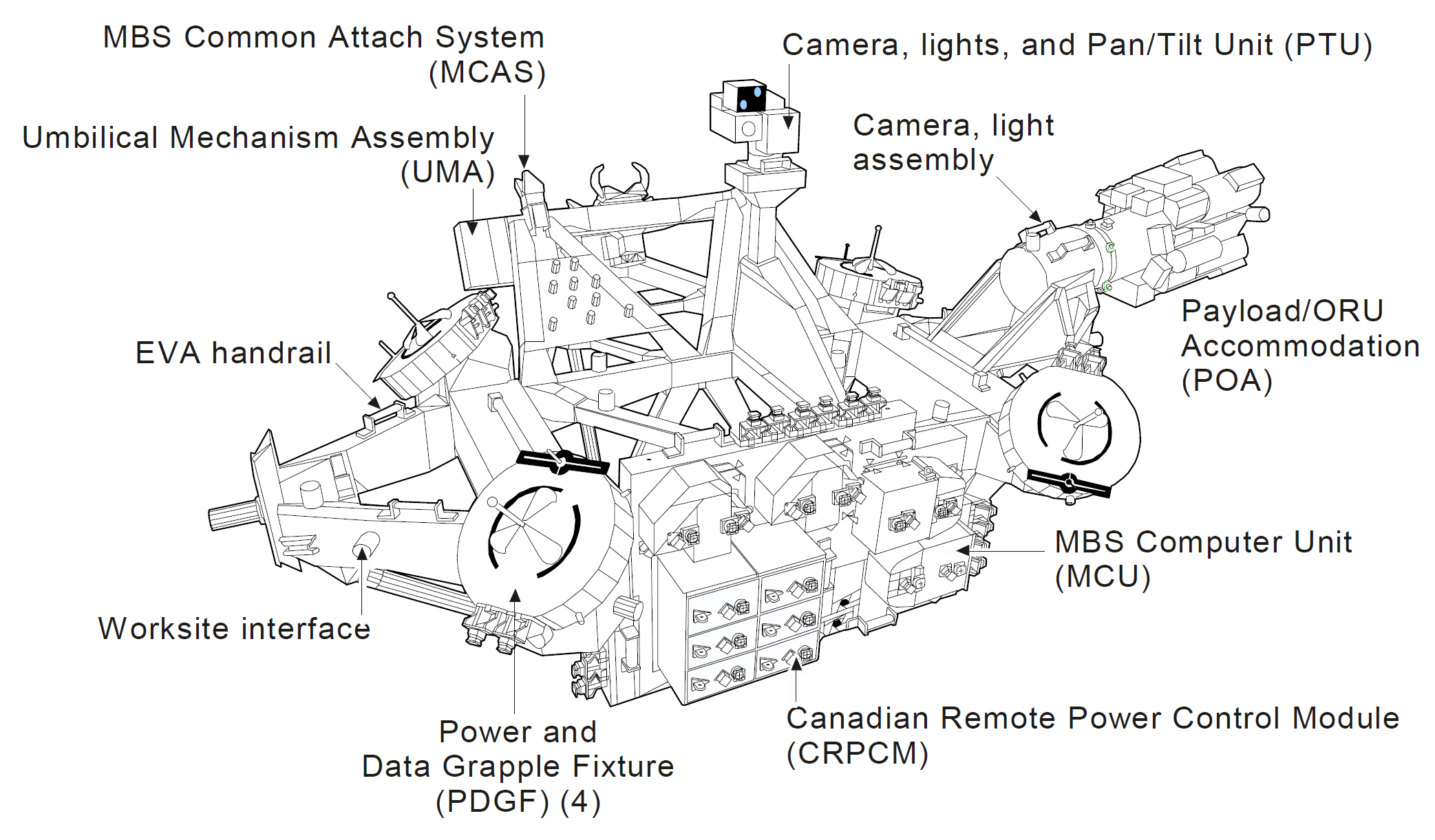 Fig.
1 : Schéma du MBS. 2. SystèmesLe MBS comporte tout d'abord quatre points d'ancrage de type PDGF, qui sont autant de bases pour le bras SSRMS. Il est aussi équipé d'un point d'ancrage pour les grosses charges (ORU), qui est conçu sur la base des extrémités LEE du SSRMS (d'ailleurs, il peut servir de LEE de rechange). Ce point d'ancrage POA (Payload/ORU Accomodation) permet de fixer directement une charge utile et de la déplacer, sans mobiliser le bras. Le POA a été installé lors de la sortie du 11 juin 2002. 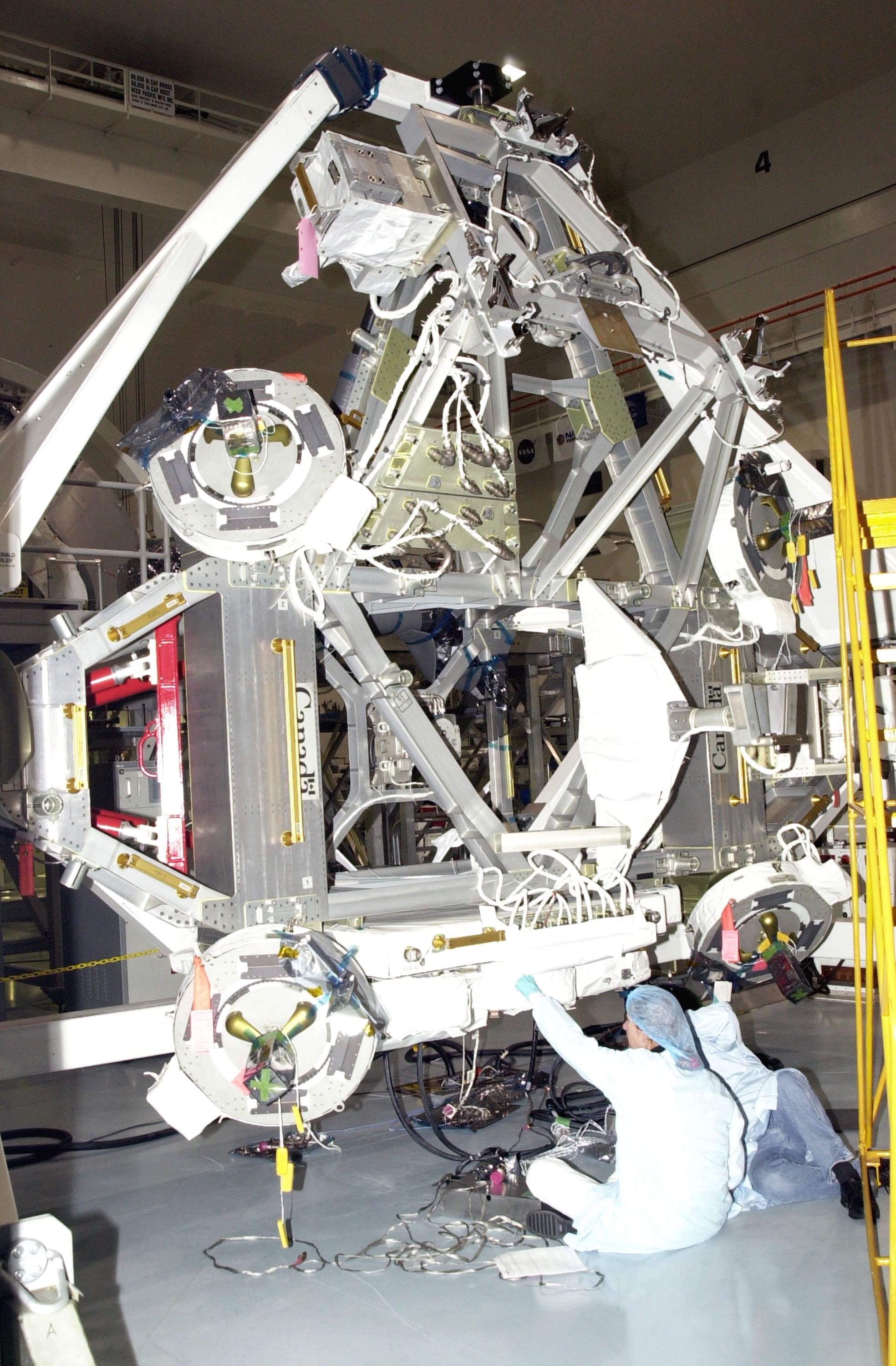 Fig.
2 : Le MBS vu de dessus. Le MBS est surplombé par un système de caméra (PTU) qui permet aux astronautes d'avoir en visuel les quatre PDGF. Lors du lancement, la PTU était installée en dessous du MBS afin d'aider les astronautes à le fixer sur le MT. Elle a été fixée à son emplacement définitif lors de la sortie du 11 juin 2002. La puissance électrique parvient au MBS au travers un RPCM dédié, appelé CRPCM (Canadian RPCM). 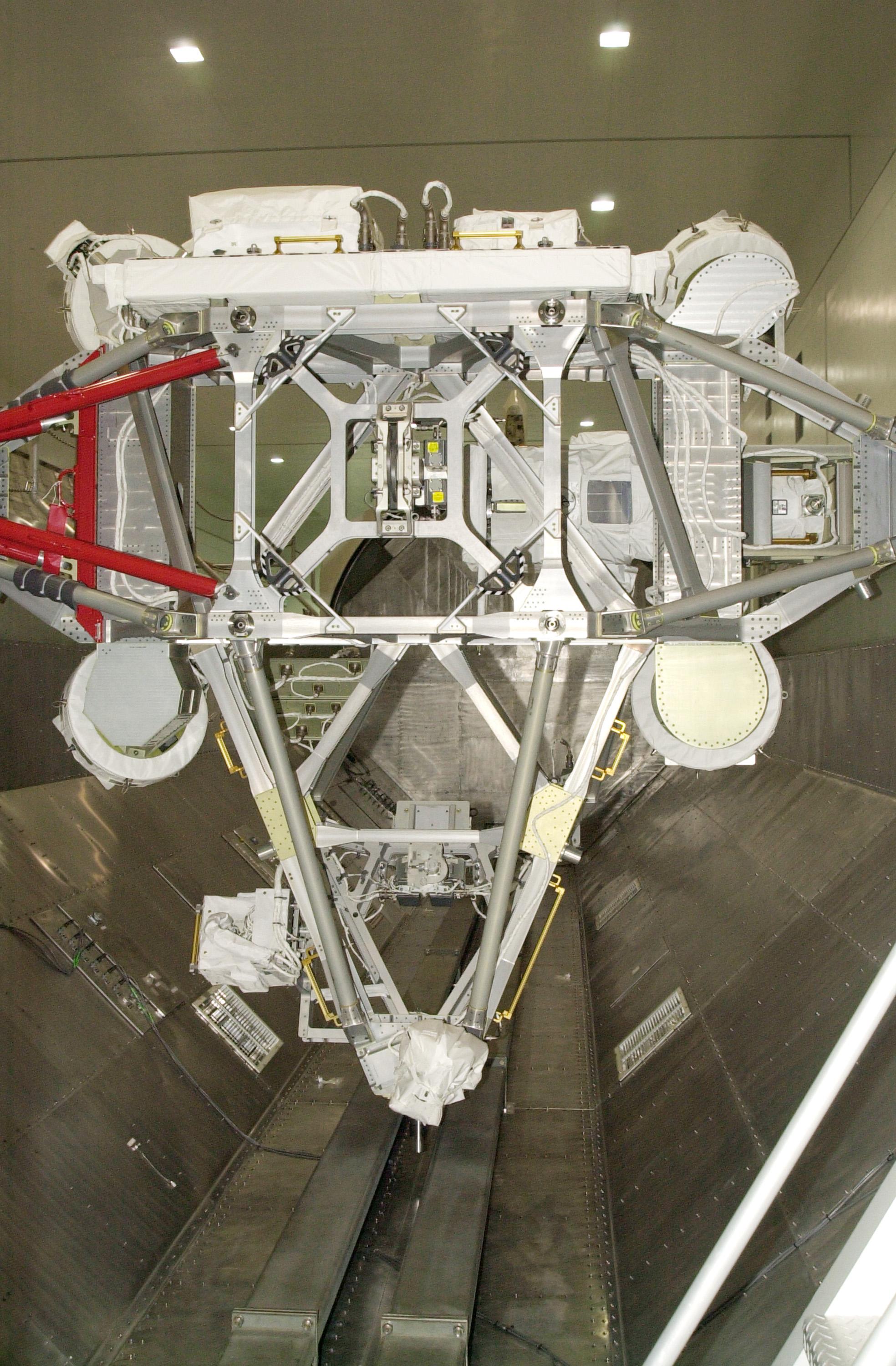 Fig.
3 : Le MBS vu de dessous. Bibliographie[1] Dossier de presse STS-111 Dernière mise à jour : 8 mai 2012 |
|