Soyouz | Système de sauvetage d'urgenceLe système de sauvetage d'urgence SAS (Система Аварийного Спасения) du vaisseau Soyouz permet d'assurer la survie de l'équipage en cas d'échec du lanceur. 1. Historique1.1. Le développementLe développement du vaisseau 7K, qui deviendra plus tard le 7K-OK, alias Soyouz, débute à l'OKB-1 dès 1961, alors que les premiers vaisseaux Vostok commencent à peine à voler. Le département n°11 de Vladimir ROCHTCHINE se penche sur la question des moyens de sauvetage de l'équipage en cas d'accident [1]. Sur les Vostok, la sécurité du cosmonaute n'est pas assurée pendant les premières secondes du vol, car le siège éjectable n'est efficace qu'à partir d'une certaine altitude. Pour Soyouz, cette solution n'est pas jugée acceptable, car la phase la plus dangereuse est justement le lancement. A partir de 1962, l'équipe de ROCHTCHINE travaille avec des spécialistes de l'Institut de Recherches en Vol (LII) et arrive à la conclusion que le moyen le mieux adapté au spatial est un système de petites fusées qui éjectent le vaisseau à une altitude suffisante pour qu'il puisse utiliser ses propres moyens d'atterrissage [1]. Une solution de ce type a été retenue aux Etats-Unis pour le programme Mercury. Elle prouvera son efficacité le 25 avril 1961 en sauvant un vaisseau inhabité lors d'un vol d'essai où le lanceur Atlas LV-3B a explosé en vol. 
Fig. 1.1.1 : Actionnement de la tour d'éjection lors du vol Mercury MR-1, 21 novembre 1960. Le développement des moteurs à ergols solides est confié à l'usine MMZ Iskra, où un groupe est spécialement créé pour ce projet, sous la direction de B. KOULIKOV [3]. 
Fig. 1.1.2 : B.S. KOULIKOV. L'ergol est fourni par le NII-125 de Boris ZHOUKOV, où ce projet est dirigé par Isaak LOPOUK. Le NII-125 et MMZ Iskra coopèrent depuis plusieurs années dans le domaine des missiles sol-air, et cette expérience va être mise à profit pour le système de sauvetage de Soyouz. 

Fig. 1.1.3 : La fusée 13D du complexe S-75 et son premier étage à ergols solides. Afin d'assurer la stabilité du vaisseau Soyouz lors de son éjection par la fusée à ergol solide, l'OKB-1 décide d'utiliser la technique des panneaux cellulaires [5]. Développée dès les années 1950 par le professeur Sergueï BIELOTSERKOVSKI, enseignant à l'Académie Zhoukovski, elle permet d'assurer une très bonne stabilité de l'ensemble tout en offrant des caractéristiques massiques optimales. Youri GAGARINE, étudiant de BIELOTSERKOVSKI à partir de septembre 1961, réalisera son sujet de diplôme sur cette thématique. Soixante ans plus tard, les lanceurs Falcon-9 de SpaceX réutiliseront la technique pour assurer la stabilité de leur premier étage lors de son retour sur Terre. 
Fig. 1.1.4 : Youri GAGARINE avec le professeur Sergueï BIELOTSERKOVSKI. Des essais sont conduits au LII de 1963 à 1964, sous la direction de Gaï SEVERINE [1][4]. Les essais de qualification complète du système SAS, avec largage de la coiffe et récupération du Compartiment de Descente (SA), sont réalisés à l'usine expérimentale d'Instruments de Mesure de Tchapaïevsk (TchOZIP), dans la Région de Samara [7]. Vidéo 1.1.1 : Essai du système de sauvetage d'urgence. 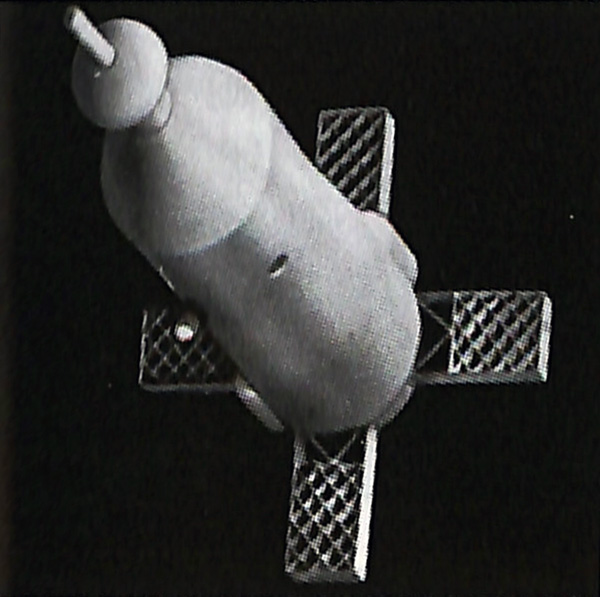
Fig. 1.1.5 : Modèle du SAS pour les essais en soufflerie. 1.2. Le système des premiers SoyouzLe système SAS du vaisseau Soyouz de première génération est équipé de la fusée d'éjection 11D828. Elle est constituée d'un moteur central TsRD pour l'éjection du vaisseau, de moteurs de séparation RDR pour larguer la tour et de moteurs de contrôle URD pour déporter la trajectoire du vaisseau en cas d'éjection. Par ailleurs, la coiffe est équipée de deux moteurs DSS pour larguer ses deux sections. 
Fig. 1.2.1 : Schéma de la tour de première génération (11D828). Le premier vol de Soyouz, et donc le premier essai en vol du SAS, est réalisé depuis Baïkonour le 28 novembre 1966. Lors du deuxième vol d'essai, le 14 décembre 1966, le SAS est actionné de façon intempestive alors que le lanceur est toujours sur le pas de tir. Les flammes dégagées par la fusée d'éjection provoquent un incendie et, in fine, la destruction totale du lanceur. L'accident provoque la mort de trois hommes. Suite à cet événement, la logique de commande du SAS est modifiée, et plus aucun incident ne sera jamais à déplorer. 
Fig. 1.2.2 : L'équipage de Soyouz-5 devant le SAS. Le système SAS, toutefois, ne permet pas d'assurer la sécurité de l'équipage à chaque instant de la phase de mise sur orbite. En effet, pour répondre à des contraintes de masse, la fusée d'éjection est larguée dix secondes avant la coiffe. Lors de cette période, le vaisseau ne peut être éjecté ni par la fusée (qui a été larguée), ni par ses propres moyens (car il est toujours prisonnier de la coiffe) [3]. De plus, en cas d'accident sur le pas de tir, l'altitude d'éjection n'est pas suffisante pour utiliser le parachute primaire (OSP), et c'est donc le parachute secondaire (ZSP) qui doit être actionné. Outre la perte de fiabilité du fait de l'absence de redondance des parachutes dans ce type de situations, l'atterrissage avec le ZSP est plus violent qu'avec l'OSP [3]. 1.3. Amélioration du SAS après l'accident de Soyouz-11Suite à l'accident de dépressurisation de Soyouz-11 en juin 1971, qui a conduit à la perte de l'équipage, le vaisseau Soyouz est modifié et sa masse augmente. Comme les performances du lanceur Soyouz (11A511) restent inchangées, le TsKBEM (successeur de l'OKB-1) demande à MMZ Iskra de réduire la masse du SAS [3]. Une version allégée 11D828M de la fusée d'éjection est donc produite. Par rapport à la première version, la coupole qui recouvrait le moteur central TsRD est supprimée, et les moteurs de contrôle URD sont maintenant à l'intérieur de la tour [3]. La nouvelle version vole pour la première fois sur Cosmos 496 le 26 juin 1972. 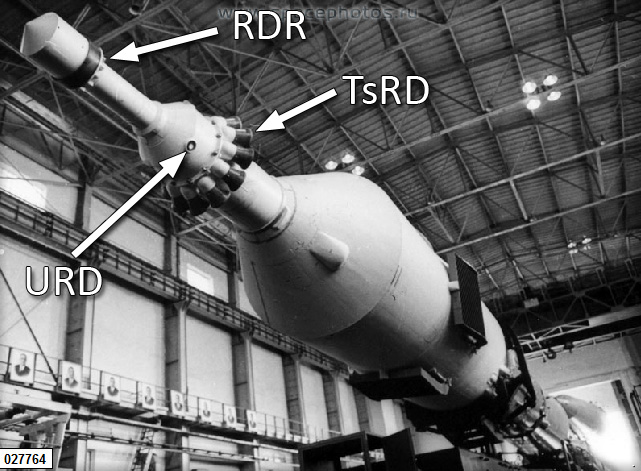
Fig. 1.3.1 : Le SAS de Soyouz-18, en 1975. Le 5 avril 1975, lors du lancement du vaisseau 7K-T n°39, le lanceur subit un dysfonctionnement de son deuxième étage (Bloc A). La tour d'éjection a déjà été larguée, et le système SAS commande le largage du vaisseau. L'équipage peut ainsi être sauvé. 
Fig. 1.3.2 : Schéma du système SAS modifié après Soyouz-11. 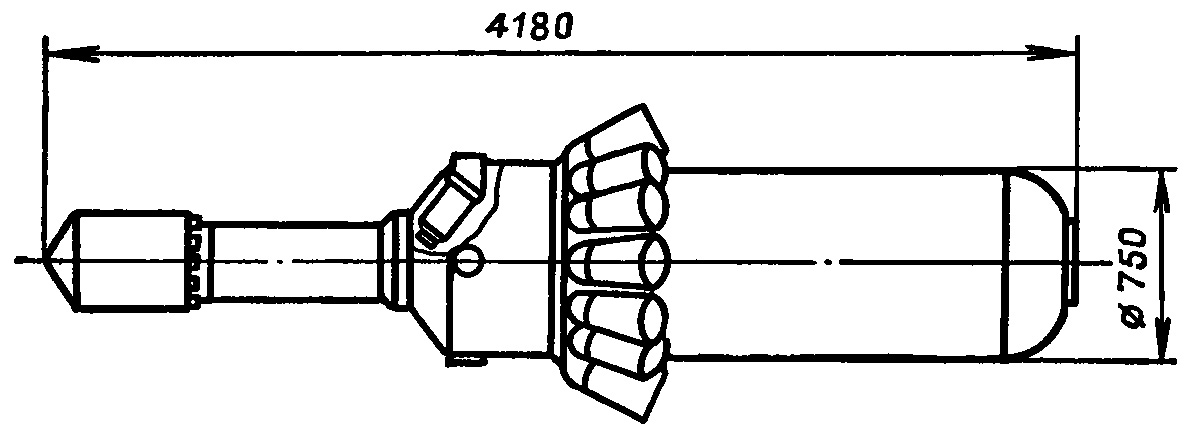
Fig. 1.3.3 : Schéma de la tour d'éjection du système SAS modifié après Soyouz-11. 1.4. La deuxième génération pour Soyouz TParallèlement aux préparatifs pour le programme Apollo-Soyouz, le TsKBEM développe une nouvelle génération de son vaisseau spatial, appelée Soyouz T (11F732). Une nouvelle fois, MMZ Iskra révise la conception de la tour d'éjection, et fournit le nouveau modèle 11D855 [3]. 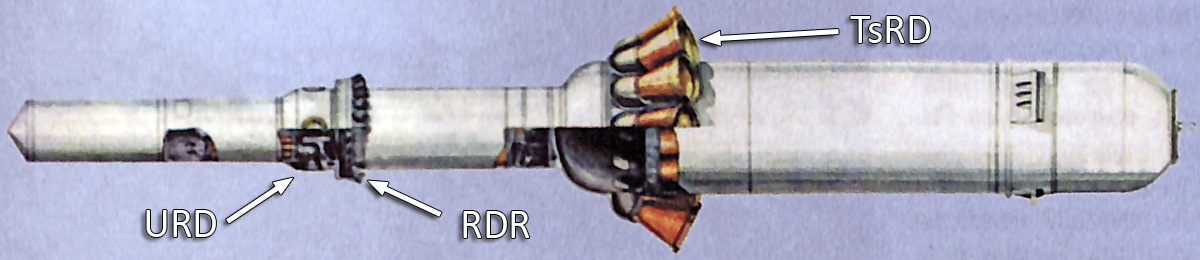
Fig. 1.4.1 : Schéma de la tour de deuxième génération (11D855). Il permet d'augmenter l'altitude d'éjection du vaisseau en cas d'accident sur le pas de tir, afin de garantir le bon fonctionnement des parachutes. De plus, il permet de déporter davantage le vaisseau, afin de l'éloigner du lanceur accidenté. Pour optimiser le déport latéral, la direction du vent est prise en compte dans le choix de l'allumage des moteurs de contrôle URD [3]. 
Fig. 1.4.2 : La tour d'éjection 11D855 de Soyouz T. 
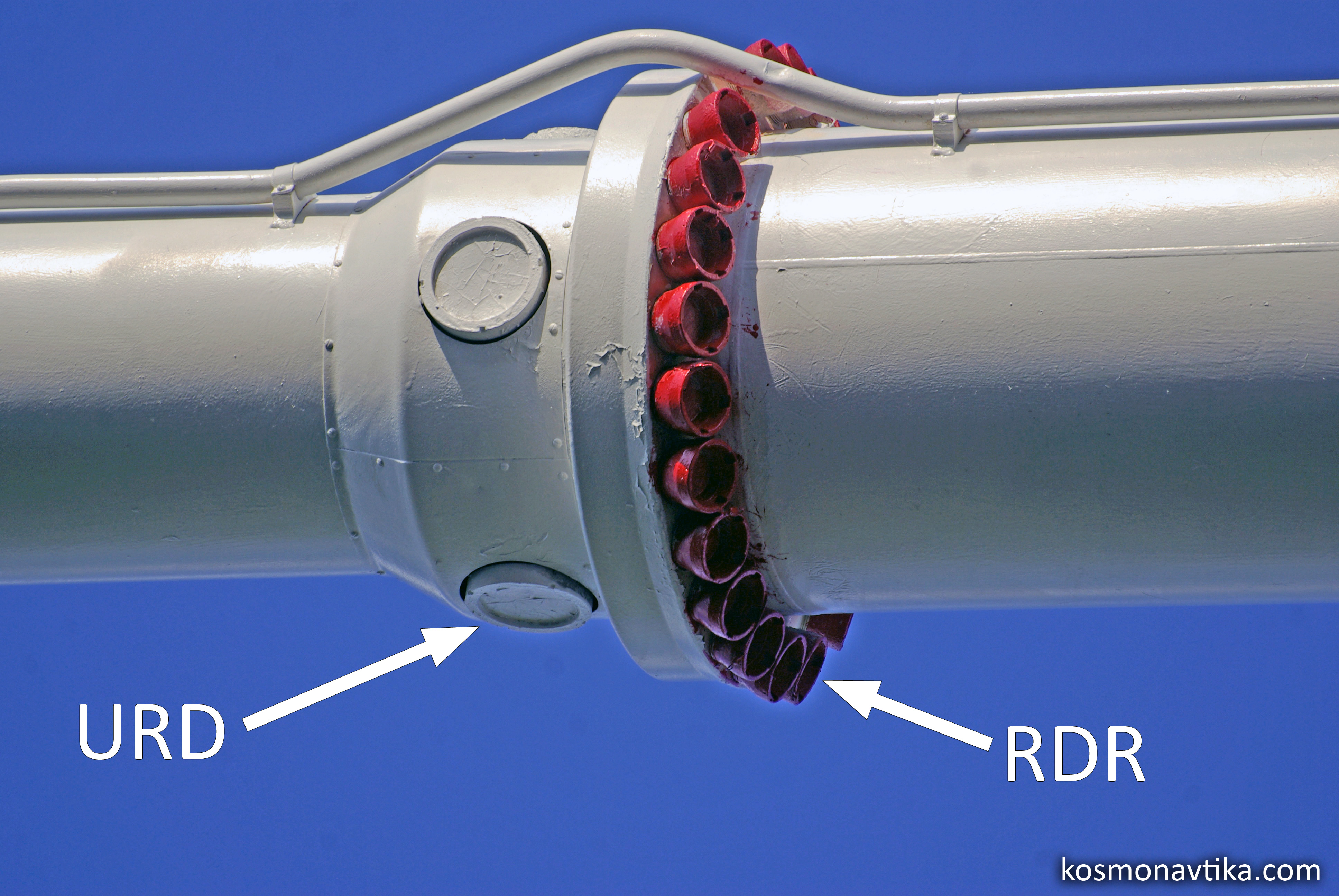
Fig. 1.4.3 : Les moteurs de la tour d'éjection 11D855. Deux paires de moteurs, appelés RDG, sont ajoutées sur la parti supérieure de la coiffe. Ils permettent d'assurer l'éjection du vaisseau dans l'intervalle de temps entre le largage de la tour et le largage de la coiffe. Avec cette version, il n'existe donc plus aucune phase où l'équipage ne peut pas être secouru [3]. Comme la phase dangereuse est supprimée, la tour d'éjection n'a plus lieu d'être conservée aussi longtemps qu'avant. Elle est donc larguée dès que l'altitude atteinte par le lanceur permet d'assurer un atterrissage en toute sécurité via une éjection par les nouveaux moteurs RDG, c'est à dire à H0+123", contre H0+160" précédemment. Ce gain permet de compenser l'augmentation de la masse de la tour pour cette nouvelle version [3]. 
Fig. 1.4.4 : Vue des moteurs de coiffe de la tour d'éjection 11D855. Le 26 septembre 1983, pour la première fois dans l'Histoire (et, jusque là, la dernière), la tour d'éjection est utilisée lors de la destruction sur le pas de tir d'un lanceur Soyouz-U. L'équipage du vaisseau Soyouz T n°16L peut ainsi être sauvé. 1.5. Une nouvelle version pour Apollo-SoyouzEn 1972 démarre le programme de coopération internationale Apollo-Soyouz (EPAS), pour lequel le TsKBEM développe une version modifiée Soyouz-M (11F615A12) de son vaisseau. Sa masse dépassera de 200kg celle des versions précédentes, et MMZ Iskra doit fournir une version du SAS adaptée à ces nouvelles contraintes [3]. Elle est basée sur la version 11D855 de Soyouz T, mais adaptée à la masse de Soyouz-M. La nouvelle fusée d'éjection est plus puissante, et elle permet de supprimer le délai de dix secondes durant lesquels le sauvetage n'était pas possible. Sa conception bénéficie également des avancées réalisées dans le cadre du programme lunaire 7K-L1 [3]. 
Fig. 1.5.1 : Le SAS de Soyouz-22, le dernier Soyouz-M, en 1976. A l'été 1974, le premier essai de la nouvelle tour échoue : le vaisseau n'est pas emmené suffisamment haut pour assurer le bon fonctionnement des parachutes, et le SA s'écrase. La cause de l'échec est rapidement trouvée : les moteurs de contrôle n'ont pas fonctionné correctement, et deux des quatre stabilisateurs ne se sont pas déployés. Un second essai est réalisé, sans incident cette fois, ce qui permet de qualifier la tour [11]. 1.6. L'ultime modernisation pour Soyouz TMDans les années 1980, le TsKBEM, devenu entre temps la NPO Energuia, produit une nouvelle version Soyouz TM (11F732A51) pour desservir la station orbitale Mir. MMZ Iskra, qui devient MKB Iskra en 1990, adapte la tour d'éjection, qui devient la 11D855M. Toutes les versions ultérieures du vaisseau Soyouz conserveront ce modèle. 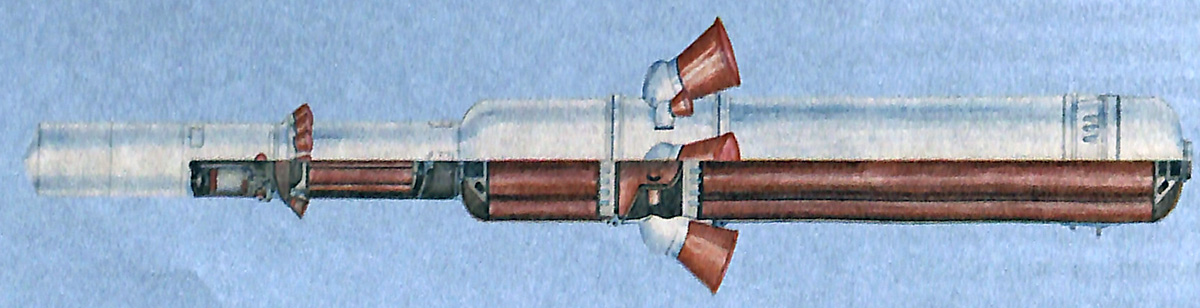
Fig. 1.6.1 : Schéma de la tour de deuxième génération modifiée (11D855M). La version modifiée est allégée par rapport à la précédente, ce qui permet de compenser l'augmentation de la masse du vaisseau Soyouz TM. Le gain de masse est notamment obtenu par l'utilisation de nouveaux matériaux [3]. Par ailleurs, le moteur central TsRD est d'un type nouveau. Il est maintenant constitué de deux chambres de combustion indépendantes, dotées de quatre tuyères chacune. Par ailleurs, l'instant de largage de la tour en cas de lancement nominal est une nouvelle fois avancé [3]. Vidéo 1.6.1 : Essai de la tour 11D855M pour le Soyouz TM. 
Fig. 1.6.2 : Le SAS de Soyouz TMA-19M, en 2015. 
Fig. 1.6.3 : Une maquette de la tour d'éjection 11D855M. Le 18 juin 1987, un lanceur Soyouz-U inhabité s'écrase sur le cosmodrome de Plesetsk. L'enquête montre que la commande qui aurait actionné le SAS si un vaisseau Soyouz avait été embarqué n'a pas été émise, ce qui aurait probablement conduit à la perte de l'équipage [13]. La commission d'enquête constate par ailleurs que, par conception, toutes les commandes d'urgence des lanceurs Soyouz sont inhibées pendant huit secondes après le décollage, et que ce délai peut être réduit à seulement 1,5 secondes. Deux vols inhabités sont réalisés pour qualifier le nouveau programme de vol, avant de l'utiliser également pour les vols habités [13]. 
Fig. 1.6.4 : Construction d'une tour SAS chez MKB Iskra en 2017. 2. Descriptif de la version pour Soyouz TM (et ultérieurs)2.1. GénéralitésLe système de sauvetage d'urgence SAS est constitué du boîtier de contrôle BAS-1, situé dans le Compartiment de Vie (BO) du vaisseau, de l'ensemble moteur DU SAS (Двигательная Установка САС), et de la coiffe qui protège le vaisseau. 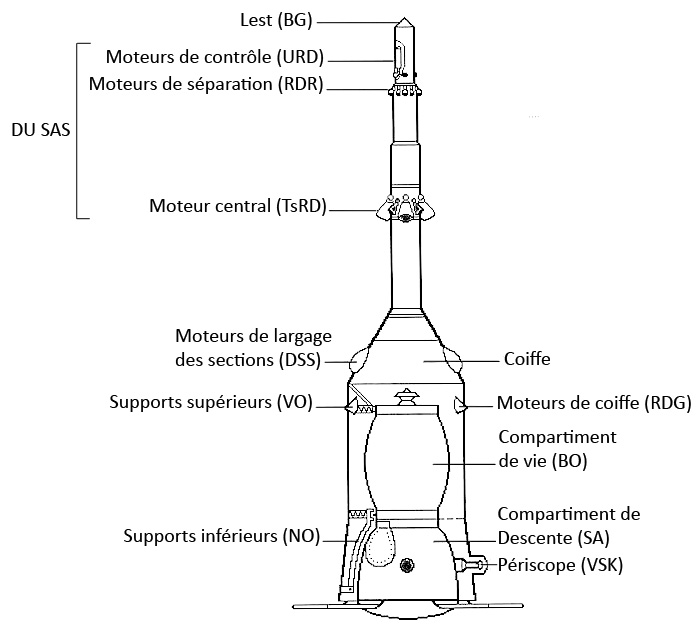
Fig. 2.1.1 : Schéma du système SAS avec la tour d'éjection 11D855M (Soyouz TM). 2.2. L'ensemble moteur DU SASLe DU SAS regroupe trois types de moteurs : - Le moteur central TsRD (Центральный ракетный двигатель) Son rôle est de fournir la poussée qui permet d'extraire le Compartiment de Descente (SA), le Compartiment de Vie (BO) et la coiffe en cas d'accident sur le pas de tir ou à basse ou moyenne altitude. Il est constitué de deux chambres de combustion distinctes 
Fig. 2.2.1 : Vue du moteur TsRD. - Quatre moteurs de contrôle URD (Управляющие ракетные двигатели) Dirigés latéralement, ils permettent de déporter la trajectoire du vaisseau pendant le fonctionnement du moteur central. - Les moteurs de séparation RDR (Ракетные двигатели разделения) Ils permettent d'éloigner la coiffe et le BO du SA après que celui-ci a été extrait du lanceur et amené à une distance de sécurité. Lors d'un lancement nominal, ce sont ces moteurs qui permettent d'éjecter la tour d'éjection. Cette action a lieu à H0+115", à l'altitude de 46km. 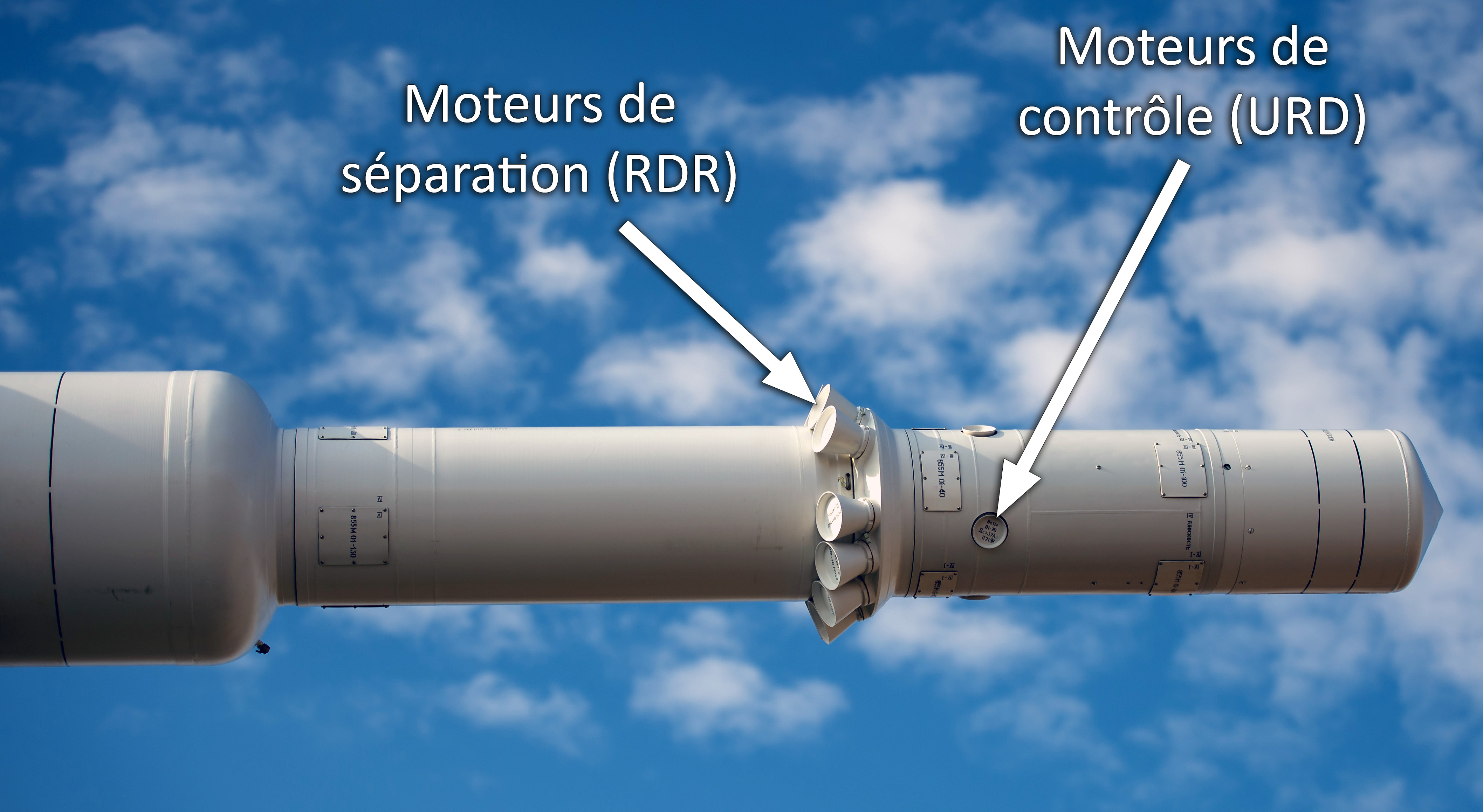
Fig. 2.2.2 : Vue des moteurs URD et RDR. 
Fig. 2.2.3 : Assemblage d'une tour SAS à Baïkonour. 2.3. La coiffeLa coiffe qui abrite les vaisseaux Soyouz est constituée de deux demi-coiffes qui s'ouvrent au moment de la séparation du vaisseau. De plus, comme en cas d'éjection seuls le BO et le SA sont extraits, la coiffe est séparable au niveau de l'interface entre le SA et le PAO. La coiffe elle-même est munie de deux types de moteurs : - Les deux moteurs de largage des sections DSS (Двигатели сброса створок) Ils ne jouent aucun rôle en cas d'accident, et servent uniquement à larguer les deux sections de la coiffe lors d'un lancement nominal. - Les quatre moteurs de coiffe RDG (Ракетные двигатели головного обтекателя). Leur rôle est d'apporter une poussée supplémentaire dans le cas d'une éjection depuis le pas de tir, ou à basse altitude. De plus, ce sont eux qui assureront l'éjection du vaisseau si l'accident intervient après le largage de la tour d'éjection. 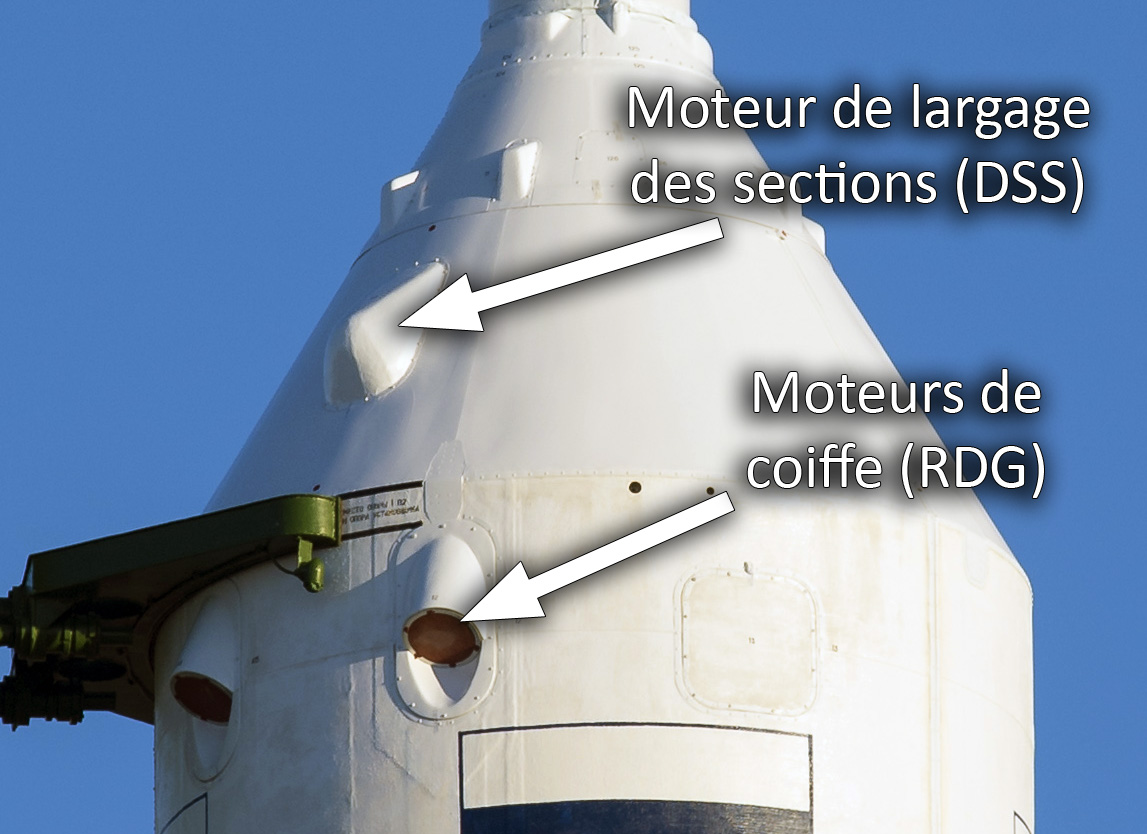
Fig. 2.3.1 : Vue des moteurs DSS et RDG. 
Fig. 2.3.2 : Vue des moteurs RDG à l'intérieur de la coiffe. Sous la coiffe, le vaisseau Soyouz est maintenu par deux types de supports (supérieurs et inférieurs) afin d'assurer sa stabilité en cas d'éjection. Les trois supports inférieurs NO (Нижняя опора) sont fixés sur le Compartiment de Descente (SA) avant sa mise sous coiffe. Ils restent toujours solidaire de la coiffe, et sont donc emportés avec elle quand elle est larguée. 
Fig. 2.3.3 : Les supports inférieurs (NO) avant leur installation. Vidéo 2.3.1 : Fixation des NO sur le SA. En cas d'éjection, la stabilité du vaisseau secouru abrité par la coiffe est assurée par quatre stabilisateurs. Il s'agit de panneaux cellulaires fixés sur la coiffe qui sont déployés au moment de l'éjection. 

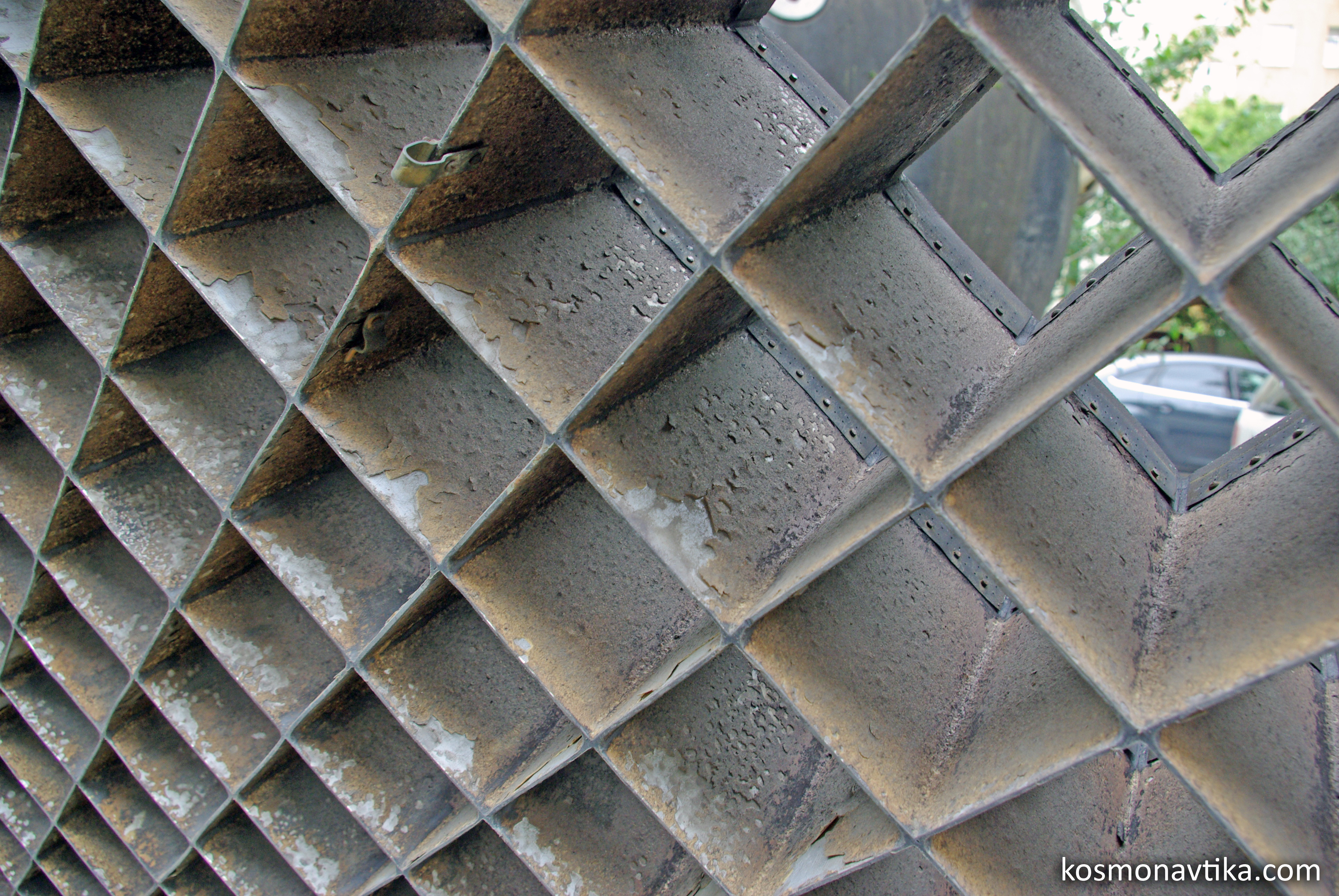
Fig. 2.3.4 : Un panneau cellulaire de vaisseau Soyouz. 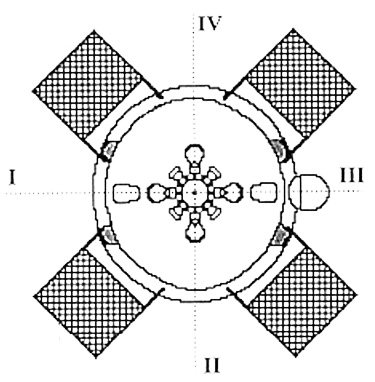
Fig. 2.3.5 : Schéma de la coiffe avec ses stabilisateurs déployés. 
Fig. 2.3.6 : Les stabilisateurs avant leur installation. 2.4. La commandeA partir de l'instant du décollage (KP), l'ordre d'actionnement du système SAS peut-être envoyé soit par le système de contrôle du vaisseau, sur réception du signal « Echec lanceur », soit par l'opérateur au sol, via le système de télécommande. L'ordre doit être donné indépendamment par deux personnes : le directeur de tir et le chef de l'équipe de lancement. Chacun d'eux communique avec un opérateur. Les deux opérateurs sont situés dans des endroits distincts de la station Saturn de Baïkonour, et ils n'ont aucun moyen de communiquer entre eux. Ils doivent donner l'ordre d'éjection à moins de cinq secondes d'intervalle pour qu'il soit validé. L'ordre est donné par les deux directeurs au moyen d'un mot de passe propre à chaque lancement [10]. 
Fig. 2.4.1 : L'un des deux opérateurs du SAS à la station Saturn. Pour assurer une redondance technique, en plus de la redondance humaine, l'ordre est émis simultanément par la station de télécommande et par l'antenne KTNA [10]. 

Fig. 2.4.2 : Les antennes Kvant-P et KTNA de la station IP-5 de Baïkonour. 2.5. Récapitulatif des moteurs utilisés
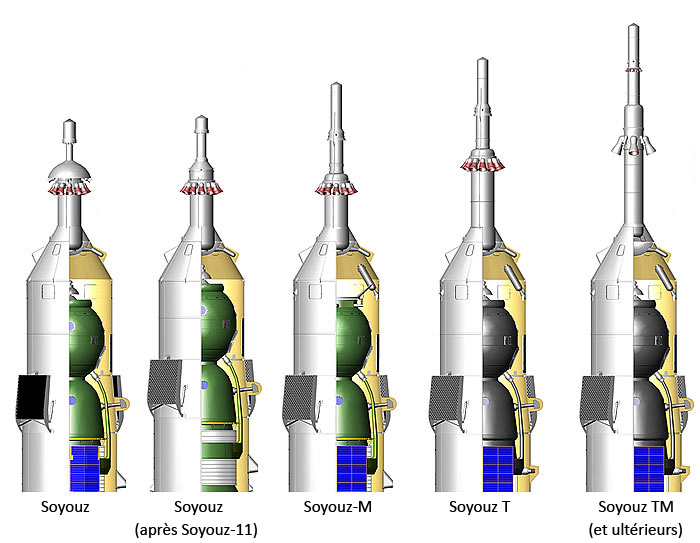
Fig. 2.5.1 : Comparatif des différentes versions du SAS. 3. Séquence de fonctionnement de la version pour Soyouz TM (et ultérieurs)Le lancement d'un vaisseau Soyouz est décomposé en six phases [8] : Phase 1 : lanceur sur le pas de tirCette phase commence au moment de l'armement du système SAS (Взведение САС) et se termine à l'instant du décollage HKP (Контакт Подъема). L'actionnement du système SAS ne peut être émis que par les opérateurs au sol, via le système de télécommande. Lors de la réception du signal à l'instant HSAS, les boulons pyrotechniques qui relient le Compartiment de Descente (SA) au Compartiment des Machines et des Instruments (PAO) sont actionnés, les chambres 1 et 2 du moteur TsRD sont mises à feu. Le vaisseau est alors extrait du lanceur et propulsé vers le haut. A l'instant HSAS+1,8", les moteurs URD sont allumés à leur tour, selon un programme qui dépend de la direction du vent. La trajectoire du vaisseau est déportée latéralement. Ensuite, à HSAS+4", les moteurs de coiffe RDG sont actionnés afin d'augmenter l'altitude du vaisseau. Quand il atteint son altitude maximale, le SAS commande le largage du périscope VSK et la séparation du Compartiment de Descente du reste du vaisseau. Les moteurs RDR sont mis à feu pour éloigner la coiffe et le Compartiment de Vie (BO) du Compartiment de Descente. Le système d'atterrissage KSP lance sa séquence d'atterrissage d'urgence, en utilisant le parachute secondaire (ZSP). En effet, même avec l'emploi des moteurs RDG, l'altitude n'est pas suffisante pour permettre l'utilisation du parachute primaire (OSP). Lors d'une éjection de ce type, l'équipage subit une accélération maximale d'environ 10G [9]. Phase 2 : Lanceur à basse altitudeCette phase débute à l'instant du décollage HKP et se termine à HKP+20". En cas d'échec du lanceur, ses moteurs ne sont pas mis hors service afin de sauvegarder le pas de tir. Le système SAS commandera les mêmes actions que pour la phase 1. Phase 3 : Lanceur à moyenne altitudeCette phase débute à HKP+20" et se termine à l'instant théorique de largage de la tour d'éjection. Lors de la réception du signal d'urgence (HSAS), les boulons pyrotechniques qui relient le SA au PAO sont actionnés, la chambre 1 du moteur TsRD est mise à feu. Le vaisseau est alors extrait du lanceur et propulsé vers le haut. A l'instant HSAS+1,8", l'un des moteurs URD est allumé (celui du plan II) pour déporter la trajectoire. Quand le vaisseau atteint son altitude maximale, le SAS commande le largage du périscope VSK et la séparation du SA du reste du vaisseau. Les moteurs RDR sont mis à feu pour éloigner la coiffe et le BO du SA. 
Fig. 3.1 : Une tour d'éjection après sa retombée, lors d'un lancement nominal en 1987. Phase 4 : Sauvetage sans tour d'éjectionCette phase débute à l'instant du largage de la tour d'éjection, et se termine à l'instant de largage de la coiffe. Sur émission du signal d'échec du lanceur (HSAS), ce sont deux des quatre moteurs de coiffe RDG qui sont mis à feu et qui permettent d'extraire le vaisseau (SA + BO). A l'instant HSAS+0,32", les deux moteurs RDG restants sont allumés à leur tour pour éloigner le vaisseau du lanceur. Le système SAS commande ensuite le largage du périscope VSK et la séparation du SA. L'atterrissage se fait en utilisant le parachute primaire du système KSP. Phase 5 : Lanceur à haute altitudeCette phase débute au moment du largage de la coiffe et se termine au moment de la commande de séparation préliminaire du vaisseau. La tour et la coiffe ayant été larguées, il n'y a plus aucun moyen actif de sauvegarde du vaisseau. Sur signal d'actionnement du SAS, celui-ci commande l'arrêt des moteurs du lanceur et la séparation du SA et du BO. Le PAO, quant à lui, reste solidaire du lanceur. L'atterrissage est réalisé au moyen du parachute primaire (OSP) du système KSP. Phase 6 : Lanceur sur orbiteCette phase débute au moment de la commande de séparation préliminaire du vaisseau, et se termine à l'instant de l'arrêt du moteur du lanceur. Le vaisseau est alors déjà sur orbite, bien que non nominale. En cas d'actionnement du système SAS pendant cette période, le vaisseau est séparé du lanceur selon la séquence normale, et la rentrée dans l'atmosphère est ordonnée. Bibliographie
[1] BIESTCHASTNOV, S., Et al., Пилотируемые космические корабли "Союз", in PERVOV, M., История развития отечественной пилотируемой космонавтики, Moscou, 2015
Dernière mise à jour : 15 octobre 2016 |
| ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||